Seit 2017 mache ich verschiedene Computer-Visionen: von eindeutigen Erkennungen und Klassifizierungen bis zum Lippenlesen .
Und nach einer Reihe von Unfällen bin ich der einzige Computer Vision-Ingenieur in einem Startup, das unbemannte Hubschrauber herstellt. Aus diesem Grund entscheide ich mich, mit meinen Computer Vision Beinen einzubrechen und ein Haustierprojekt im Zusammenhang mit Drohnen durchzuführen.
Der Plan lautet wie folgt: Ich werde einfach ein Quadric mit einer Kamera, einem Autopiloten und einem Randstück Eisen (Antriebsneuronen und andere Lebensläufe) zusammenbauen und eine universelle Flugplattform plus oder minus erhalten. Zum Beispiel wie dieses , aber flexibler und billiger. Und es gibt viele interessante Anwendungen: von der Erkennung einer Person und ihrer Verfolgung bis zur Steuerung eines Quadrocopters mithilfe von Reinforcement Learning .
So begann meine 8-monatige Reise: von der Idee und Bestellung der ersten Komponenten auf aliexpress bis zur vollständigen Nutzung der visuellen Kilometerzähler an Bord durch den Quadcopter und dem Mitfliegen.
Im ersten Teil des Artikels (nach ein paar Absätzen!) Werde ich zeigen und zeigen, welche Komponenten ich verwendet habe, um einen Quadrocopter für diese Aufgabe zusammenzubauen, woran ich mich bei der Auswahl orientiert habe und was zu berücksichtigen ist, damit er fliegt.
( !) , , GPS, visual SLAM.
,
450 ( 450).

. : . - . , tradeoff \.
,

-, . , , ¯\_(ツ)_/¯
( AliExpress) . 700KV (← ; , KV ). KV.
,
( ), , , , ( ).
: , , 10 . 10, , , , .
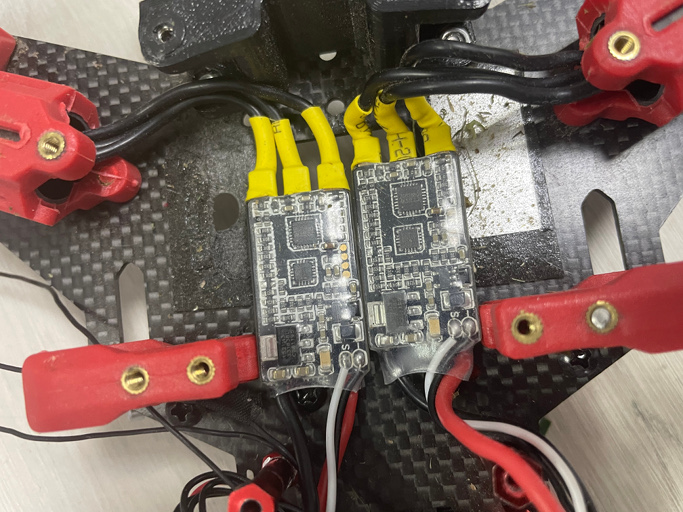
ESC. DShotXXX ( XXX, )
, software , ESC ( ArduPilot PX4, )
,
( — XXYY): ( ). . ? . .

, , : - .
, . 1145.
, . , , . - , - :)
( ): 1) ( ) 2) .
,

( "") .
: . , , . 4S Li-Po , 5000 mAh. . , ( ) 20 .
,

(\) . .. . , . ( ) FrSky (Taranis X10 lite FrSky R-XSR). , , \.
"" RadioMaster. , FrSky , .
,
software stack (state estimation, , ), hardware ( software stack ).
Hardware , ( IMU, , ).

( + GPS, , ), , .
- . .. - . open-source , ( ): ArduPilot PX4.
ardupilot ( , ) 2020- hardware - pixhawk 4 mini.
, companion computer

, . companion computer , , - path planning, external navigation, + task specific .
: Intel Movidius, Google Coral, Jetson . Raspberry c .. , "" .
Jetson-e Nano ( ) (TensorRT), GPU .. - CUDA ( CUDA, , ?), SLAM .
,
Intel RealSense D435, , RGB . Raspberry Pi c MIPI .. 3D , - , .
, , , rolling shutter .. , .
, !
, (, ) !
, , :
Getting Started. . , .
, companion computer . , .
, , . , , ( , ESC).
, .
, ( ⇒ ).
Loctite ( ), ( , ). - .
( ), , .
( GPS), .
. : , . LiPo 4.2v. , "" , ( 3.5-3.6v)
, ?
, : .
- . (), .
Das Ergebnis ist eine Drohne, auf der es sehr langweilig ist, im manuellen Modus zu fliegen. Wenn sie fliegt, ist sie nur auf der Straße groß und für den Innenbereich geeignet. Aber DimDrone wird als eine hervorragende Plattform dient zum Testen und anderes Computer Vision Algorithmen erforschen.