
Kleine Hufeisenfledermaus
Dieses Projekt beschreibt die Entstehung der sogenannten. Fledermausdetektor - ein Gerät, mit dem Sie die Geräusche von Fledermäusen hören und aufzeichnen können. Sie wissen wahrscheinlich, dass Fledermäuse Ultraschall zur Echolokalisierung abgeben. Die Frequenz dieser Geräusche liegt außerhalb des vom menschlichen Ohr wahrnehmbaren Bereichs, sodass sie nicht direkt gehört werden können. Der Fledermausdetektor verwendet ein spezielles Mikrofon, das diese hochfrequenten Geräusche aufnehmen und in Geräusche umwandeln kann, die in den hörbaren Bereich fallen.
Es gibt drei Arten von Fledermausdetektoren . Für mich selbst habe ich eine Überlagerung gemachtDetektor. Sein Nachteil ist, dass es schwieriger ist, verschiedene Arten von Fledermäusen zu unterscheiden, als Hochfrequenzgeräusche aufzunehmen. Ich werde später erklären, wie ein Überlagerungsdetektor funktioniert, aber schauen wir uns zuerst das Mikrofon an, das zur Aufzeichnung von Ultraschall benötigt wird.
Bei der Auswahl eines Mikrofons habe ich zunächst zwei Optionen in Betracht gezogen:
- ein Elektretmikrofon - alles, was ich laut den Unterlagen gefunden habe, funktioniert nur im Bereich von 10 bis 20 kHz. Wenn Sie jedoch an einige Ressourcen glauben, nehmen einige ihrer Typen in gewissem Maße auch Ultraschall wahr. Da ihre offiziellen Beschreibungen dies jedoch nicht anzeigen, würde es viel Versuch und Irrtum erfordern, die verschiedenen Marken durchzugehen und sie auszuprobieren. Also habe ich diese Art von Mikrofon aufgegeben.
- piezoelektrische Sensoren... Sie sind beispielsweise in den beliebten Ultraschall-Entfernungsmessern HC-SR04 zu finden, die allgegenwärtig und billig sind. Ihr Nachteil ist, dass ihre Empfindlichkeit sehr nahe an der Resonanzfrequenz liegt, irgendwo um 40 kHz. Und wenn Sie sich von dieser Frequenz entfernen, fällt die Empfindlichkeit stark ab. Sie passen also auch nicht.
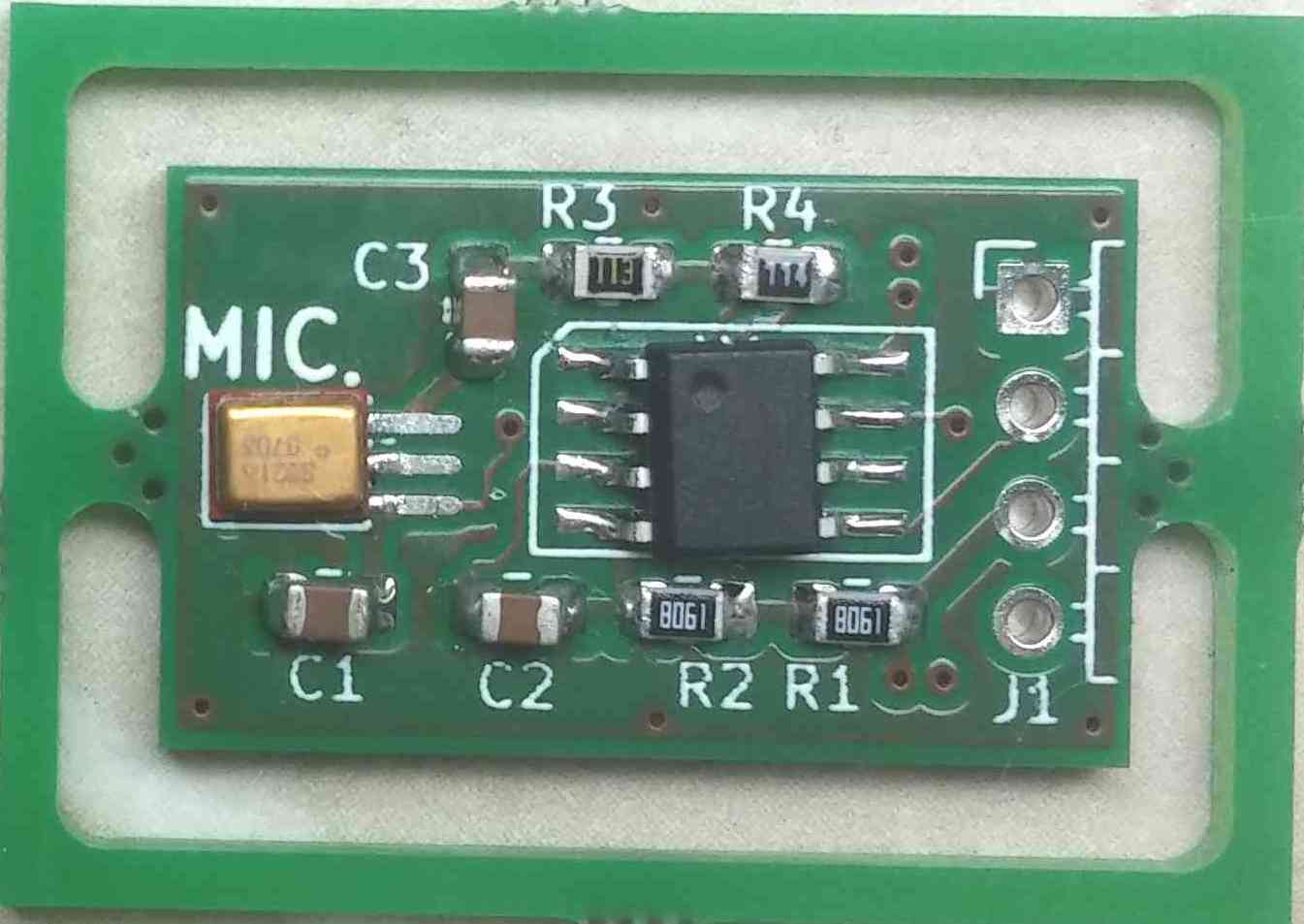
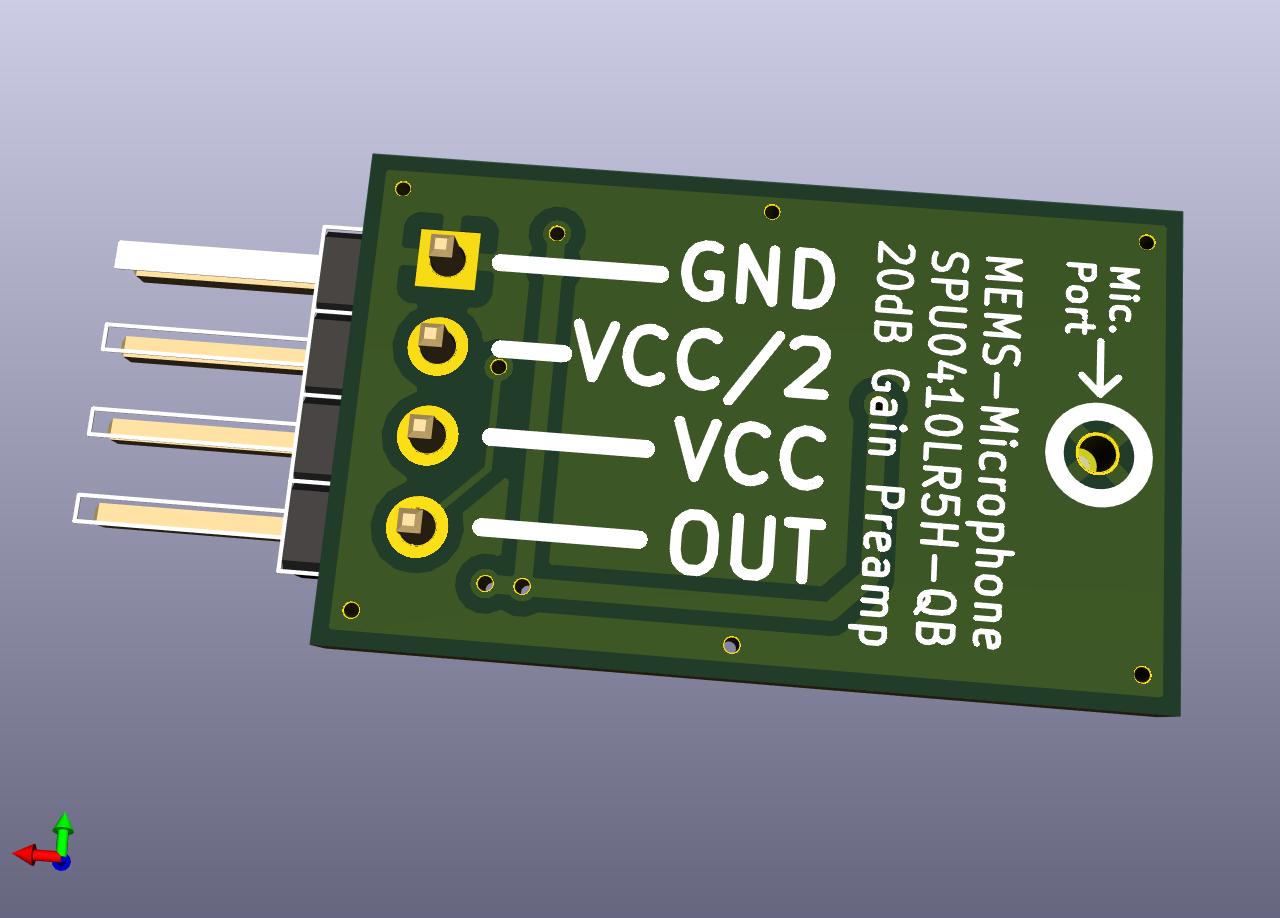
Stattdessen fand ich ein Knowles SPU0410LR5H- Mikrofon, ein MEMS- Mikrofon... Gemäß der Spezifikation hat dieses Mikrofon bei allen Frequenzen bis zu 80 kHz eine ziemlich flache Antwortkurve, so dass es für dieses Projekt sehr gut geeignet ist. Darüber hinaus verfügt es über einen internen Vorverstärker mit hohem Rauschabstand. Der Hauptnachteil dieses Mikrofons ist, dass sein Gehäuse nicht für hausgemachte Projekte vorgesehen ist. Es ist winzig (3,76 x 3 mm!) Und seine Kontakte befinden sich im Gehäuse. Ich suchte im Internet und stieß auf die Seite des hackaday.io-Benutzers Alan Green, der dieses Mikrofon auch in seinem Projekt verwendet hat. Er hatte eine gute Idee, eine spezielle Platine für dieses Mikrofon herzustellen, damit es manuell gelötet werden kann. Es geht darum, die Pads so zu verlängern, dass sie aus dem Bauteil herausragen. Ich nahm diese Idee und entwarf eine kleine Platine für ein Mikrofon und einen Dual-Operationsverstärker. Letzteres liefert eine virtuelle Masse (bei der halben Versorgungsspannung) sowie eine 20-dB-Verstärkerstufe (d. H. 10-mal). Anfangs war ich skeptisch, dieses Mikrofon manuell zu löten, aber alles funktionierte gut - alle 6 Platinen, die ich gelötet habe, waren erfolgreich. Ich habe zur Verdeutlichung ein Video des Lötens aufgenommen. Das Design der Platten ist auch aus öffentlich .

Beginnen wir mit der Erläuterung des Funktionsprinzips eines Überlagerungsfledermausdetektors. Beginnen wir mit den von Mäusen ausgesendeten Signalen. Sie können als signalamplitudenmodulierte Ultraschallträgerfrequenz modelliert werden und das Hüllkurvensignal wie ein kurzes "Chirp" ist das Signal (ein Signal mit linearer Frequenzmodulation ).
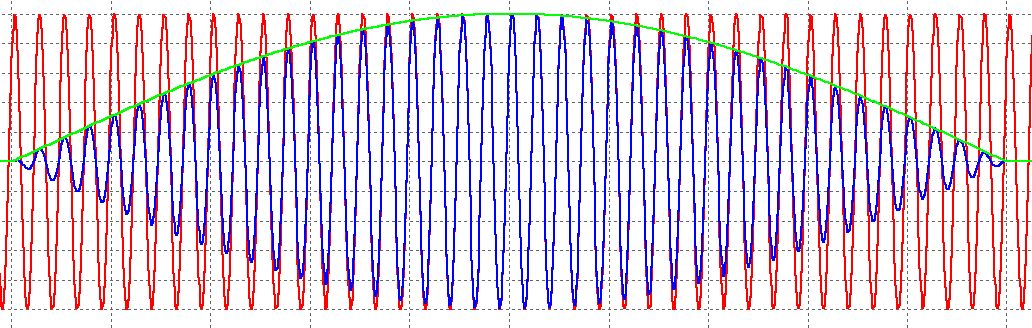
Im Ultraschalldiagramm ist der Träger rot dargestellt, die Hüllkurve des Chirps ist grün dargestellt und die Gesamtsumme ist blau dargestellt. Um das Signal in den vom Menschen hörbaren Bereich zu übersetzen, müssen Sie es konvertieren, um die Hüllkurve (Chirp) zu erhalten, und es mit einem Trägersignal mit einer niedrigeren Frequenz (z. B. im Bereich von 1 bis 5 kHz) modulieren. Wie kann dies erreicht werden?
Um zu verstehen, wie dies aus mathematischer Sicht geschieht, verwenden wirbekannte trigonometrische Identitäten :
2sin (x) ⋅sin (y) = cos (x - y) - cos (x + y)
2cos (x) ⋅cos (y) = cos (x - y) + cos (x + y)
2sin (x) ⋅cos (y) = sin (x - y) + sin (x + y)
2cos (x) ⋅sin (y) = - sin (x - y) + sin (x + y)
Wenn wir unsere nehmen Signalmodell von Fledermäusen kann wie folgt modelliert werden:
Träger (t) = sin (2πf c t)
Chirp (t) = sin (2πf Chirp t)
Fledermaus (t) = Träger (t) ⋅ Chirp (t)
wobei die Ultraschallfrequenz ist Träger - f c und die Frequenz des Chirpsignals - f Chirp . Nehmen wir für dieses Beispiel an:
f c = 40 kHz
f chirp = 1 kHz
Unter Verwendung trigonometrischer Identitäten erhalten wir:
Fledermaus (t) = sin (2πf c t) ⋅ sin (2πf chirp t) = 1/2 cos (2π (f c - f chirp ) t) - 1/2 cos (2π (f c + f chirp ) t)
Das zu modulierende Signal besteht aus zwei Frequenzen, die symmetrisch um die Trägerfrequenz angeordnet sind, in diesem Beispiel
40 kHz - 1 kHz = 39 kHz,
40 kHz + 1 kHz = 41 kHz.
Dies ist das untere LSB und das obere USB- Seitenband :
f LSB = f c - f zwitschern
f USB = f c + f zwitschern
Wir können jetzt das gleiche Prinzip verwenden, um das Maussignal in eine niedrigere hörbare Frequenz umzuwandeln. Dazu müssen Sie das Signal mit der Frequenz des lokalen LO-Generators multiplizieren - dies ist die Differenz zwischen der Trägerfrequenz des Signals und der gewünschten Trägerfrequenz (in unserem Fall der hörbaren Frequenz, bei der wir die Schreie von Fledermäusen hören möchten). Diese Technik wird als Heterodyning bezeichnet. Nehmen wir in unserem Beispiel an, wir möchten die Schreie von Mäusen mit einer Frequenz von 5 kHz hören, die für den Menschen deutlich hörbar ist. Dann gilt:
f Ziel = 5 kHz
f LO = f c - f Ziel = 35 kHz
LO (t) = sin (2πf LO t)
Wenn wir alles zusammenfassen, können wir die Terme der Gleichungen unter Verwendung trigonometrischer Identitäten umschreiben:
bat (t) ⋅LO (t) = (1/2 cos (2πf LSB t) −1/2 cos (2πf USB t)) ⋅sin (2πfLOt)
= 1 / 2cos (2πf LSB t) ⋅sin (2πf LO t) - 1 / 2cos (2πf USB t) ⋅sin (2πf LO t)
= 1/4 (sin (2π (f LO - f LSB ) t) + sin (2π (f LO + f LSB ) t) - sin (2π (f LO - f USB ) t) - sin (2π (f LO + f USB ) t))
(unter Berücksichtigung von sin (- x) = - sin (x)),
= 1/2 (-1 / 2sin (2π (f LSB- f LO)) t) + 1 / 2sin (2π (f USB - f LO ) t) + 1 / 2sin (2π (f LSB + f LO ) t) - 1 / 2sin (2π (f USB + f LO ) t))
= 1/2 (-1 / 2 sin (2π (fc - f LO -f Chirp ) t) + 1 / 2sin (2π (fc - f LO + f Chirp ) t) + 1 / 2sin (2π (fc + f LO - f chirp ) t) - 1 / 2sin (2π (fc + f LO + f chirp ) t))
= 1 / 2cos (2πf Ziel t) ⋅sin (2πf chirp t) + 1 / 2cos (2πf 2 t) ⋅sin (2πf chirp t)
Es ist ersichtlich, dass der erste Term cos (2πf Ziel t) ⋅sin (2πfChirp t) ist genau das, was wir wollen, eine Chirp-Hüllkurve, die mit einer hörbaren Frequenz von 5 kHz moduliert ist. Der zweite Term ist wieder ein Chirpsignal, das mit einer höheren Frequenz moduliert ist, f 2 = f c + f LO , in diesem Fall 75 kHz. Die zweite Komponente liegt weit außerhalb des hörbaren Bereichs und wird durch das Hochpassfilter in der Fledermausdetektorschaltung leicht abgeschnitten.
Nachdem wir nun ein theoretisches Verständnis dafür haben, wie das Heterodyning-Prinzip zum Bau eines Fledermausdetektors verwendet werden kann, wie setzen wir ihn in die Praxis um? Die Hauptsache ist, das Eingangssignal mit dem LO-Signal zu multiplizieren, was in der praktischen Elektronik nicht so einfach ist. Es gibt Schaltungen für die analoge Multiplikation (zum Beispiel die Gilbert-Zelle), und wir können einen geeigneten IC (wie NE612 ) in Verbindung mit einem Sinuswellengenerator (zum Beispiel einem Wien-Brückengenerator ) verwenden. Eine solche Lösung wird jedoch schwierig sein, und ICs für die analoge Multiplikation wie NE612 oder ähnliches sind selten und teuer.
Es stellt sich heraus, dass es eine einfachere Option gibt, die aus gängigen Standardkomponenten zusammengesetzt werden kann. Wir können einen Frequenzmischer mit analoger Schaltung zusammenbauen. Dies ist zwar kein perfekter Mixer, da er nicht beide Signale multipliziert, aber wir werden bald sehen, dass er immer noch recht gut funktioniert.
Schauen wir uns zunächst die Diagramme an und versuchen herauszufinden, wie es funktioniert.
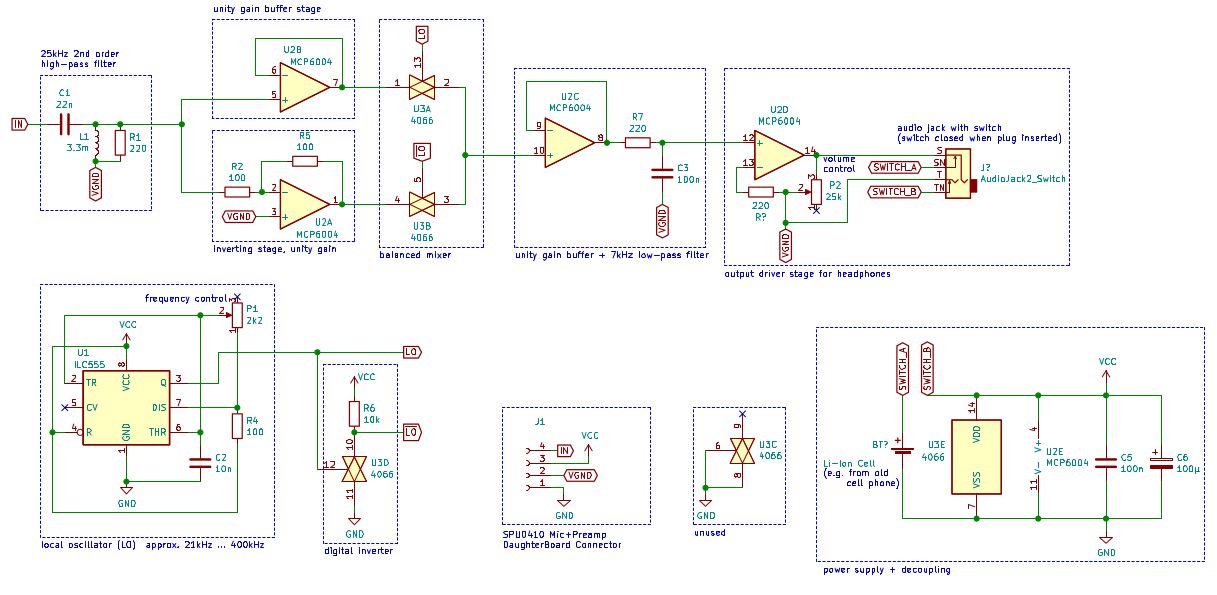
Links im Diagramm wird der Mikrofonausgang einem Hochpass-LC-Filter zweiter Ordnung zugeführt, der hörbare Frequenzen unter 20 kHz entfernt und nur Ultraschall durchlässt (da dies erforderlich ist). Der Widerstand R1 parallel zum Induktor ist erforderlich - er dämpft die Resonanz.
Nach dem Hochpassfilter kommt das Signal zu zwei Stufen von Operationsverstärkern mit den Koeffizienten 1 und -1 (d. H. Es invertiert das Signal). Wir haben jetzt sowohl das Maussignal als auch sein invertiertes Gegenstück.
Unten links im Diagramm erkennen Sie einen bistabilen Multivibrator mit dem berühmten IC 555... Das Potentiometer P1 kann die gesamte Schaltung überwachen und eine Rechteckwelle mit einem Tastverhältnis von ~ 50% und einer variablen Frequenz von 20 kHz bis 400 kHz erzeugen. In unserem Fall ist es das Signal des lokalen Oszillators LO, aber im Gegensatz zu unserem mathematischen Modell ist diese Welle quadratisch und nicht sinusförmig. Das LO-Signal gelangt in die invertierende Stufe, die aus einem Analogschalter U3D und einem Widerstand R6 besteht. Hier wird der analoge Schalter als digitaler Wechselrichter verwendet, und da der CD4066-IC über 4 analoge Schalter verfügt, haben wir zwei Ersatzschalter, von denen einer als Wechselrichter verwendet werden kann, und sparen Komponenten. Es funktioniert einfach: Wenn das LO-Signal niedrig ist, ist der Schalter offen und R6 zieht das Ausgangssignal vom Schalter nach oben. Wenn das Signal hoch ist, ist der Schlüssel geschlossen und der Ausgang des Schlüssels ist mit Masse verbunden. Auf diese Weise wird ein invertiertes Signal erhalten....
Schauen wir uns nun den Teil der Schaltung mit der Bezeichnung „Balanced Mixer“ an. Das nicht invertierte Maussignal wird einem analogen Schalter zugeführt, der das LO-Signal steuert. Das invertierte Signal wird einer anderen Taste zugeführt, die das Signal steuert... Schlüsselausgänge sind angeschlossen. Was macht dieser Teil der Schaltung?
Betrachten wir den Fall, in dem das LO-Signal 0 (niedrig) ist, und daher das Signal1 (hoch). In diesem Fall ist der untere Schlüssel U3B geschlossen und der obere Schlüssel U3A ist offen. Daher wird ein invertiertes Maussignal durchlaufen. Im umgekehrten Fall, wenn das LO-Signal 1 (hoch) ist und daher das Signal0 (niedrig)., Die untere Taste U3B ist offen und die obere Taste U3A ist geschlossen. Dann geht das nicht invertierte Signal durch. Denken Sie daran, dass dieses Umschalten bei einer Frequenz f LO erfolgt, die durch die 555-Zeitschleife bestimmt wird.
Kann dieses Verhalten mathematisch modelliert werden? Im Wesentlichen multipliziert diese Mischerschaltung das Signal mit einer Rechteckwelle, die zwischen +1 und -1 umschaltet. Dies entspricht dem Umschalten des Ausgangssignals zwischen invertiert und nicht invertiert. Eine solche Welle (nennen wir sie r (t)) kann durch das sogenannte beschrieben werden. mit der Funktion sign (x):
Daher erhalten wir am Ausgang des Mischers das Produkt bat (t) ⋅r (t). An sich erklärt dies noch nichts - um zu verstehen, wie Frequenzmischungen auftreten, müssen wir eine mathematische Magie anwenden, die als Erweiterung der Fourier-Reihen bezeichnet wird. Ich werde Ihnen die Schlussfolgerung ersparen und Ihnen das Ergebnis sofort geben. Tatsächlich kann man anhand der Fourier-Reihe Folgendes zeigen:

Unsere Rechteckwelle + 1 / -1 besteht also aus einer unendlichen Menge von Sinuskurven mit einer Grundfrequenz f LO und ihren ungeraden Faktoren. Was folgt daraus? Wenn Sie die Konstante 4 / π ignorieren, können Sie sehen, dass r (t) die Summe von LO (t) und anderen zusätzlichen höheren Frequenzen LO 3 (t), LO 5 (t) usw. ist. Aus früheren Berechnungen haben wir Folgendes gezeigt:

Daher kann berechnet werden, dass:
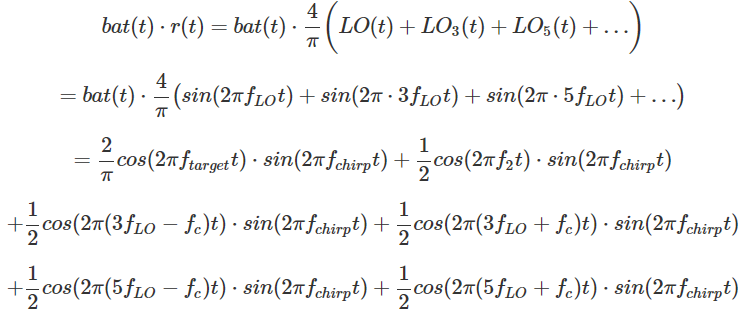
Wir sehen wieder, dass der erste Term 2 / π cos (2πf Ziel t) ⋅sin (2π f Chirp t) das ist, was wir wollen, aber mit unserem unvollständigen analogen schaltbaren Mischer haben wir am Ende eine Reihe anderer unnötiger Terme. Alle diese unnötigen Frequenzkomponenten haben jedoch viel höhere Frequenzen als unser Ziel f Ziel . Daher können wir ein Hochpassfilter verwenden, um diese Komponenten zu eliminieren und ein Endsignal zu erhalten, das ungefähr 2 / π cos (2π f Ziel t) ⋅sin (2π f Chirp t) entspricht.
Wenn wir zur Schaltung zurückkehren, gelangt der Ausgang des Mischers zur Pufferstufe und dann zum Tiefpass-RC-Filter mit einer Kopplungsfrequenz von ~ 7 kHz. Die letzte Verstärkerstufe bietet eine einstellbare Verstärkung und dient als Ausgangstreiber (z. B. Kopfhörer).
Um besser zu verstehen, wie Frequenzmischung funktioniert, habe ich in LTSpice einen Schaltungssimulator erstellt . Sie können die Simulationsdateien herunterladen und damit spielen.
Ein paar Hinweise zu den Komponenten. Ich wollte, dass die gesamte Schaltung von einem einzigen Lithium-Ionen-Akku gespeist wird, da ich einige davon von alten Telefonen und dergleichen habe. Daher muss die gesamte Schaltung mit einer Stromversorgung von 3 bis 4 V arbeiten. Daher müssen der 555-Timer und der 4066-Analogschalter als CMOS ausgewählt werden - sie arbeiten bereits mit 3 V. Ich habe den CD4066B und den ILC555 verwendet. Ein Quad-Operationsverstärker muss auch mit niedriger Spannung betrieben werden. Ich habe mich für MCP6004 entschieden, das ich oft benutze.
Ich habe das Board nicht gelegt, sondern alles auf das Steckbrett gelötet. Wenn Sie Ihr eigenes Gerät mit einer Karte erstellen möchten, laden Sie das Diagramm für KiCAD herunter... Ich habe das Gehäuse für das Gerät und die Knöpfe zum Einstellen von Lautstärke und Frequenz auf einem 3D-Drucker gedruckt. Die Stromversorgung wird automatisch eingeschaltet, wenn Sie die Kopfhörer in die Buchse stecken. Eine blinkende rote LED zeigt das Einschalten an. Die Mikrofonplatine befindet sich im Gehäuse hinter einem kleinen Loch (rechts abgebildet).

Um die Frequenzskala zu kalibrieren, habe ich den 555-Ausgang eines Oszilloskops überprüft und die Frequenzen auf dem Gehäuse markiert. Dann habe ich die Waage auf den Computer gezeichnet und ausgedruckt.
Und darauf haben wir alle gewartet. Wie klingt der Schrei der Fledermäuse auf einem Detektor? Ich biete Ihnen eine Aufnahme eines Fragments an, das ich gegen 22 Uhr aufgenommen habe, als ich den LM neben einer Laterne im Park fliegen sah. Die Frequenz wird auf 40-45 kHz eingestellt.
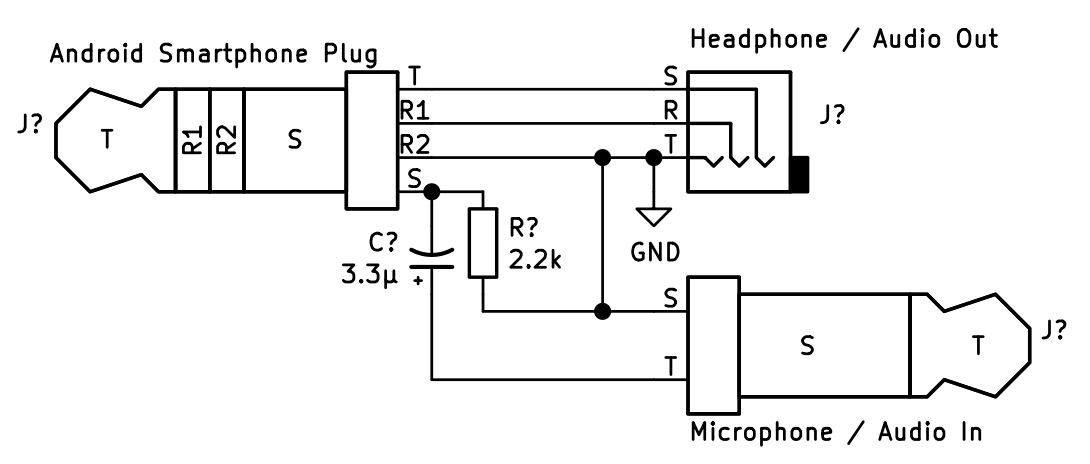
Um Ton aufzunehmen, hielt ich mein Smartphone neben die Kopfhörer des Detektors, aber es schien sehr albern, also entschied ich mich, nach einer besseren Option zu suchen. Es stellte sich heraus, dass die meisten Smartphones einen Mikrofoneingang in der Kopfhörerbuchse haben - Sie müssen nur einen 3,5-mm-Pin mit 4 Kontakten verwenden. Aus diesem Grund habe ich einen Adapter entwickelt, mit dem der Detektor an den Mikrofoneingang eines Smartphones und Kopfhörer an den Kopfhörerausgang des Smartphones angeschlossen werden können. Damit das Smartphone erkennt, dass ein Mikrofon angeschlossen ist, ist ein 2,2-kΩ-Widerstand und ein 3,3-μF-Kondensator erforderlich, um das Signal zu entkoppeln.

Ich musste auch nach einer Anwendung suchen, die gleichzeitig Audio aufnehmen und wiedergeben kann, damit ich die aufgenommenen Sounds in Echtzeit hören kann. Ich war mit der RecForge II- Anwendung zufrieden , obwohl es wahrscheinlich noch andere gibt.
Wenn Sie einen Überlagerungs-LM-Detektor selbst zusammenbauen möchten und ein fertiges Ultraschall-MEMS-Mikrofon an Bord benötigen, finden Sie es hier:
Auf diesen Boards befindet sich kein Operationsverstärker, daher müssen Sie auch einen herstellen. Der Rest der Zutaten ist in Ihrem Lieblingsgeschäft leicht zu finden.
Siehe auch: