Erinnern wir uns anlässlich des 51. Jahrestages der ersten menschlichen Landung auf dem Mond im Juli 1969 an die grundlegende Technologie, die diese Landung ermöglicht hat: den Kalman-Filter . Benannt nach Rudolf Kalman, einem amerikanischen Elektrotechniker, Mathematiker und Erfinder ungarischer Abstammung, ist der Filter eine mathematische Technik, die er 1960 vorschlug. Es ist besonders nützlich für die Schätzung der Position von Objekten basierend auf Beobachtungen mit mehreren Sensoren und wird häufig in Leit-, Navigations- und Steuerungssystemen für Fahrzeuge und Flugzeuge verwendet.
Während Kalmans Besuch im Ames Research Center der NASA in Mountain View sahen die NASA-Ingenieure, dass Kalmans Methoden das Problem der nichtlinearen Flugbahnschätzung für das Apollo-Programm lösen konnten. Das Ausführen des Kalman-Filteralgorithmus auf einem Computer aus den 1960er Jahren war jedoch nicht möglich. Ein technisches Memo (aus den NASA-Archiven, siehe unten) veranschaulicht Forschungsarbeiten in den 1960er und 1970er Jahren, in denen ein „numerisch genauer Kalman-Filter in einem speicherbeschränkten Computersystem implementiert wurde, das für Echtzeitanwendungen wie z für die Bordnavigation von Flugzeugen oder Raumfahrzeugen. "
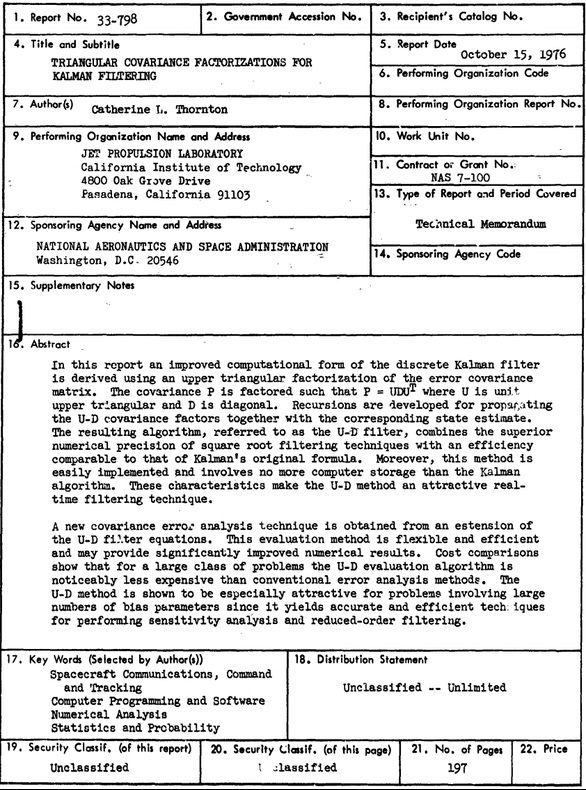
Dreiseitige Kovarianzkoeffizienten für das Kalman-Filter (NASA-Archive)
Ein weiteres großes Problem mit dem Kalman-Filter vor 50 Jahren war die mangelnde Rechenstabilität aufgrund von Rundungsfehlern, die durch die 8-Bit-Einschränkung verursacht wurden. Viele komplexe Lösungen wurden entwickelt, um dieses Problem zu lösen.
Die Bemühungen des Engineering-Teams wurden fortgesetzt und am Ende zahlte sich die Beharrlichkeit aus:
«» 2 , . «» . NASA . , . .
— , «».
In nicht geringem Maße machten solche technischen Leistungen die Mondmission zu einem Erfolg. Fünfzig Jahre später wird Kalmans Filteralgorithmus hier auf der Erde in vielen Bereichen eingesetzt, darunter Robotik, Drohnen und VR-Spiele. Forscher der Universität Tokio verwendeten 2014 den Kalman-Filter, um Roomba dazu zu bringen, Menschen erfolgreich zu erkennen und zu vermeiden. Das US Federal Reserve System verwendete den Kalman-Filter, um langfristige neutrale Zinssätze zu bestimmen und die Geldpolitik zu verwalten.
Sebastian Troon, Entwickler des selbstfahrenden Autos bei Google, lehrt das Thema der Verwendung des Kalman-Filters, um Objekte in Echtzeit zu verfolgen und selbstfahrende Autos zu erstellen. Autoware kündigte die Veröffentlichung eines Sets in diesem Monat anOpen-Source-Algorithmen, einschließlich des Kalman-Filters, und dieses Set konzentrieren sich auf die Entwicklung einer Referenzimplementierung eines selbstfahrenden Autos in der realen Welt.
Im Laufe der Jahrzehnte ihres Bestehens haben sich eine Reihe von Technologien gemeinsam weiterentwickelt und einen solchen Entwicklungsstand erreicht, dass ihre Kombination autonomes Fahren möglich, nützlich und für die Gesellschaft wertvoll macht. Um jedoch vom Prototyping zur kommerziellen Implementierung überzugehen, werden sich Unternehmen bemühen, die Interoperabilität zwischen Komponenten - Hardware und Algorithmen - zu standardisieren und sicherzustellen. Die Interoperabilität von Komponenten fördert den Wettbewerb, und der Wettbewerb trägt zur Verbesserung der Qualität und zur Kostensenkung bei, bringt eine unbemannte Zukunft näher und rechtfertigt die Milliarden von Dollar, die für Forschung und Entwicklung im Bereich unbemannter Fahrzeuge ausgegeben werden.
Verweise
:
@TeslaHackers — Tesla-, Tesla
@AutomotiveRu — ,

: