Nachdem ich mir Videos auf Youtube und meine sabbernden Kinder angesehen hatte, beschloss ich, mich an der Selbstorganisation dieses Geräts auf gemieteten Hoverboards zu versuchen. Als ich über die Zweckmäßigkeit argumentierte, es selbst herzustellen oder zu kaufen, überzeugte ich mich davon, dass dies ein Spielzeug ist und ein saisonales, und für meine Kinder kann das Wetter nicht mit einem Gerät auskommen. Auch die Erfahrung beim Zusammenbau einer Heim-CNC-Maschine spielte eine Rolle für das Selbstvertrauen, und die Popularität des Hoverboard-Trends selbst und der Wow-Effekt auf die Menschen um mich herum spielten eine Rolle.
Erfahrung in der Montage eines Kreiselrollers auf eigene Faust
Als ich mich an die Arbeit machte, beschloss ich, zunächst das Konzept zu testen und die erforderliche Leistung elektromechanischer Einheiten zu bestimmen, um weitere Investitionen in Komponenten zu rechtfertigen.
Die erste Version (Segway)
Aus mechanischer Sicht schien die Segway-Version einfacher zu sein (es gibt keine geladene mittlere Schwenkeinheit), außerdem ist alles, was ich auf Youtube gefunden habe, hausgemachter Segway.
Trotz der Tatsache, dass ich über ausreichende Erfahrung in der Programmierung und Arbeit mit Controllern verfüge, habe ich beschlossen, die Software nicht selbst zu schreiben, sondern die am besten vorgefertigten Lösungen zu finden. Außerdem kann ich meine Motivation selten länger als einen Monat aufrechterhalten, und das Debuggen von Software mit elektromechanischen Knoten endet selten in einem absoluten Sieg, häufiger in einem Kompromiss, und der Gedanke, dass keine Perfektion erreicht wurde, würde mich beunruhigen.
Infolgedessen fiel die Wahl auf die Arbeit von Ovaltines Segway Clone (die Quelle ist auf GitHub). Dieses Projekt schien mir die ausgereifteste und unterstützendste Hardware zu sein, die ich habe (Arduino, MPU-6050, Motortreiber mit 2 und 3 Steuersignalen pro Kanal). Das Projekt wird umfassend kommentiert, so dass Sie nicht tief in die Analyse von Nuancen eintauchen und infolgedessen die Mängel nicht erraten können.
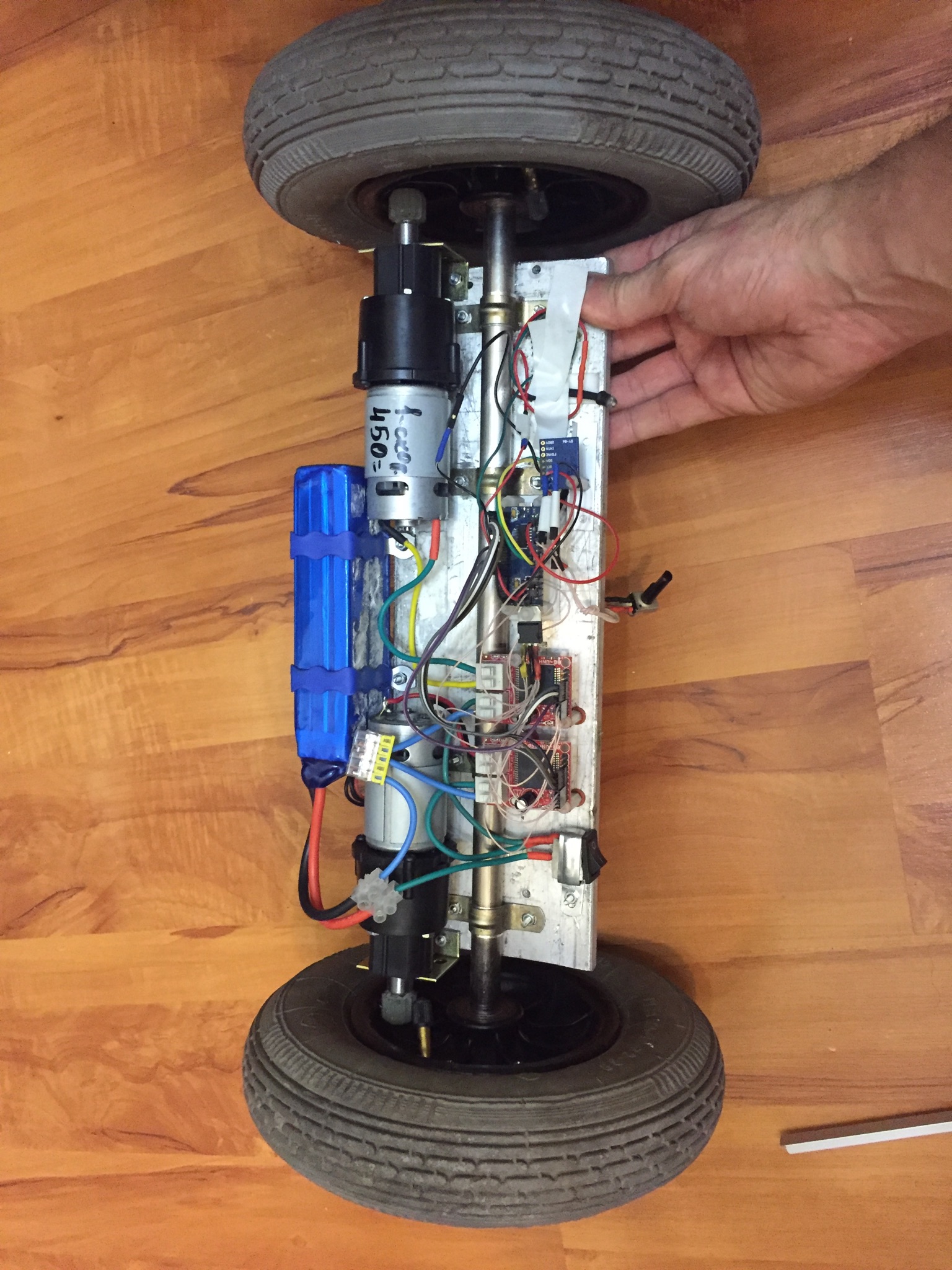
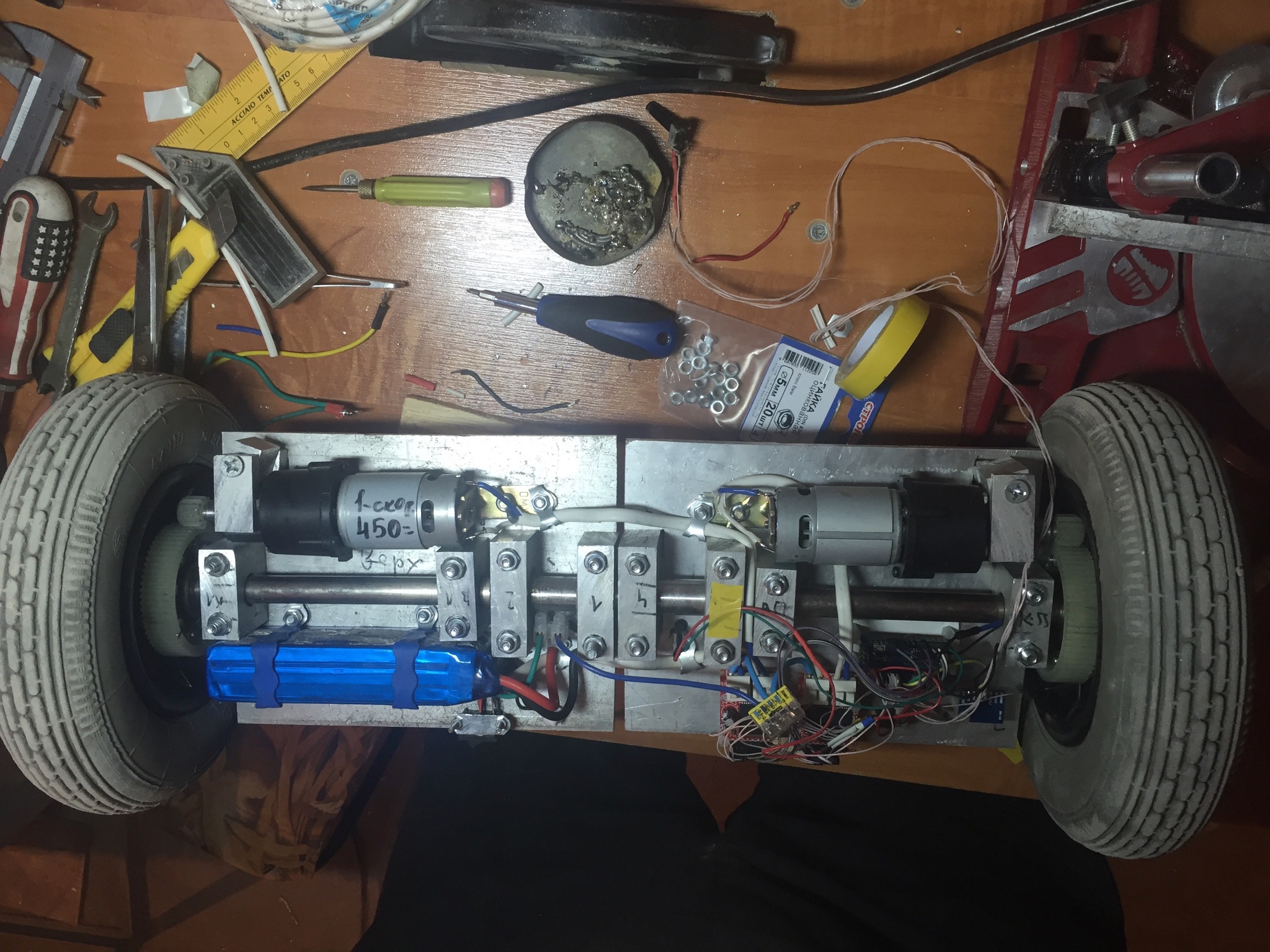
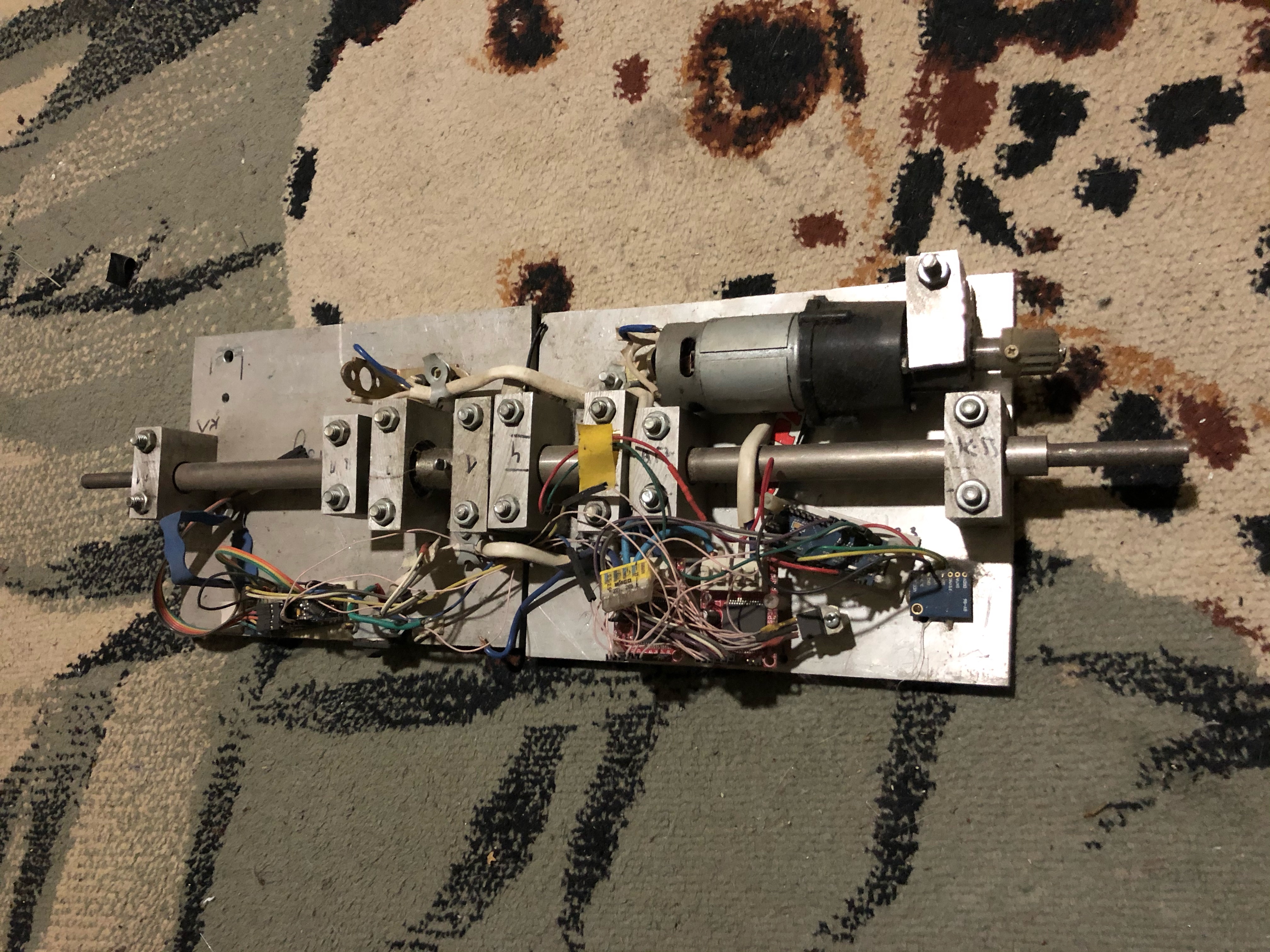
Nach einer kurzen Verzögerung wurde die Testplattform geschlagen:
Aluminiumplattendicke 12mm
Achse mit einem Durchmesser von 14 mm - eine Führung von einem Nadeldrucker
Bauklammern Durchmesser 14mm
Räder - Rollstuhlfront (8 "Durchmesser, Lager sind eingebettet).
Motoren und Planetengetriebe von 18V-Schraubendrehern
Übertragungsgetriebe von elektrischen Fleischwölfen auf Räder
Batterie 12V 5Ah Li-pol (links nach dem Abschwung des Quadcopter-Bautrends)
Vhn3sp30 Treiber
Arduino Nano
10DOF MPU-6050 ( )
,
, .1,3,4,5,6,11 .
, , , (450 , 500 ). ? , .
( 30). vnh2SP30 eBay 600, , vnh3SP30 « » (, ) .
. , , , .
: 0,5 . ( ). – . , , . 20 .
, « – » . 5:1. 1:25. 12 8 ( 5-8/). .
! vnh2 14.
.
, . , , , , , , .
()
, , , « ». , . 6 ( 12) ( 80).
, (). , .
( 17 23). , . . ( , , ). , .. (.. ).
, ( ). , , , .
: , . 16 , ( ) . . (6 .) , , .
22,5. , .
. . « ». . - . .

, , . , . ,
( \; __)
+5 : =5 =5. -5 (.. ) =5-(-5)=10; =5+(-5)=0. - .
( __; )
0 () : =0 =0. +5 ( ) =0+(-5)=-5; =5-(-5)=5. – .
( )
, ( ).
, Arduino . analogRead ( ), .. .
.
, , . «» ( ) . .
, , ( 3 ), . .. , . , .

, .
(204) . , . , , 5 . .
, , .
, . , . ( 1,5-3 - ) . , ( ). - 135…125.
– . , , «» .
5 . .
...
... und eine unschätzbare Erfahrung, um von der Couch zu kommen!
Das ist alles. Alles gut!