Neuromorphe Prozessoren, die auf dem Prinzip der Interaktion von Neuronen basieren, zeigen die besten Ergebnisse im Bereich künstlicher neuronaler Netze / Bildverarbeitungsaufgaben. Sie sind jedoch weit davon entfernt, die im Gehirn ablaufenden Prozesse nachzuahmen. Einer der vielen Gründe sind Astrozyten, die am häufigsten vorkommenden Gliazellen.
Es wurde angenommen, dass sie eine unterstützende Funktion für Neuronen haben, aber die Forschung der letzten Jahrzehnte legt nahe, dass dieser Zelltyp viel mehr als nur den Raum zwischen Neuronen ausfüllt, wie Forscher seit über einem Jahrhundert glauben. Untersuchungen zeigen, dass diese Zellen auch eine Schlüsselrolle bei den Gehirnfunktionen spielen, einschließlich des Lernens und der Erzeugung zentraler Muster (CPG), die die Grundlage für rhythmische Verhaltensweisen wie Atmen und Gehen bilden.
Nachteile bestehender neuromophiler Lösungen
Die Annahme, dass Lernen nur bei starken Verbindungen zwischen Neuronen stattfindet, ist falsch. Tatsächlich sind Lernen und Gedächtnis in Netzwerken,
die makroskopisch am Rande des Chaos arbeiten , optimal ausgeglichen. Der enge dynamische Modus wird
in Lernalgorithmen weitgehend ignoriert, aber auch vom Gehirn manifestiert.
Neuromorphen Lösungen fehlt größtenteils die Kombination der Recheneffizienz eines globalen Netzwerkziels mit der Universalität eines lokalen, aktivitätsabhängigen Mechanismus.
Neuronastrozytisches Netzwerk
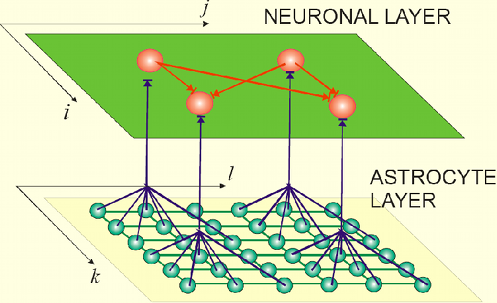
Um diese Lücke in der vorhandenen Literatur zu erkennen, entwickeln Forscher der Rutgers University Gehirnalgorithmen, die auch die Astrozytenfunktion berücksichtigen und reproduzieren.
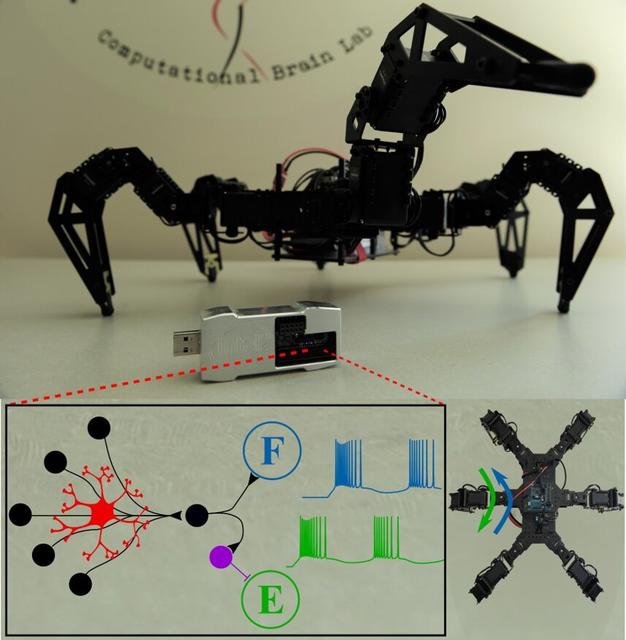
Sie schlagen (Vorsicht, Tautologie) einen gehirnmorphen CPG-Controller vor, der auf einem umfassenden neuronalen Astrozyten-Netzwerk basiert und zwei Gangmuster für einen Roboter erzeugt. Basierend auf neu identifizierten Astrozyten-Neuromodulationsmechanismen schlagen sie uns eine CPG-Architektur vor, die sich nahtlos in den neuromorphen Intel Loihi-Chip integriert, wobei eine Echtzeit-Interaktionsumgebung zwischen dem Chip und der Umgebung des Roboterbetriebssystems (ROS) verwendet wird.
Mit dem Loihi CPG kann ein Laufroboter gesteuert werden, der gegen sensorische Geräusche und variable Geschwindigkeitsprofile resistent ist.
Es ist unglaublich interessant, die Entwicklung neuer architektonischer Ansätze im Bereich der Nachahmung der Arbeit des Gehirns zu beobachten. Forschungen und Experimente sind im Gange, die unser Leben in Zukunft stark verändern werden. Und unsere Jobs.