
(Betaflight 4.1, ich habe es noch nicht mit neuen Einstellungen aufgenommen.)
Letzter Artikel - Vom Boden zum FPV-Quadrocopter: Einführung
Neulich habe ich mich für ein Upgrade auf Betaflight 4.2 entschieden, und alle um mich herum raten, die Filterung mit Zwei-Wege-DShot zu aktivieren. Übrigens war es in 4.1.
Lassen Sie uns zunächst ein wenig verstehen, was Filterung ist und warum sie benötigt wird.
Standardmäßig bietet Betaflight allgemeine Filtereinstellungen, die für die meisten Modelle geeignet sind. Um die beste Leistung zu erzielen, kann die Filterung jedoch anders eingestellt werden, da sie für eine angeschlagene Drohne möglicherweise übertrieben oder nicht ausreicht.
MEMS-Gyroskop
Jeder Quadcopter hat einen FC - Flight Controller, der im Wesentlichen ein Gehirn ist. Diese Steuerungen haben auch einen digitalen Chip, der oft als Gyro-Gyroskop bezeichnet wird. Es ist ein Sensor, der Bewegung erfasst. Es enthält ein kleines elektromechanisches Gerät namens MEMS (Micro Electro Mechanical System).
In diesem Gerät befinden sich mechanisch schwingende "Stecker". Diese Stecker befinden sich an allen drei Achsen (Nick-, Roll-, Gier-) und Bewegungen (mechanischer Teil) erzeugen Spannungsschwankungen (elektrischer Teil).
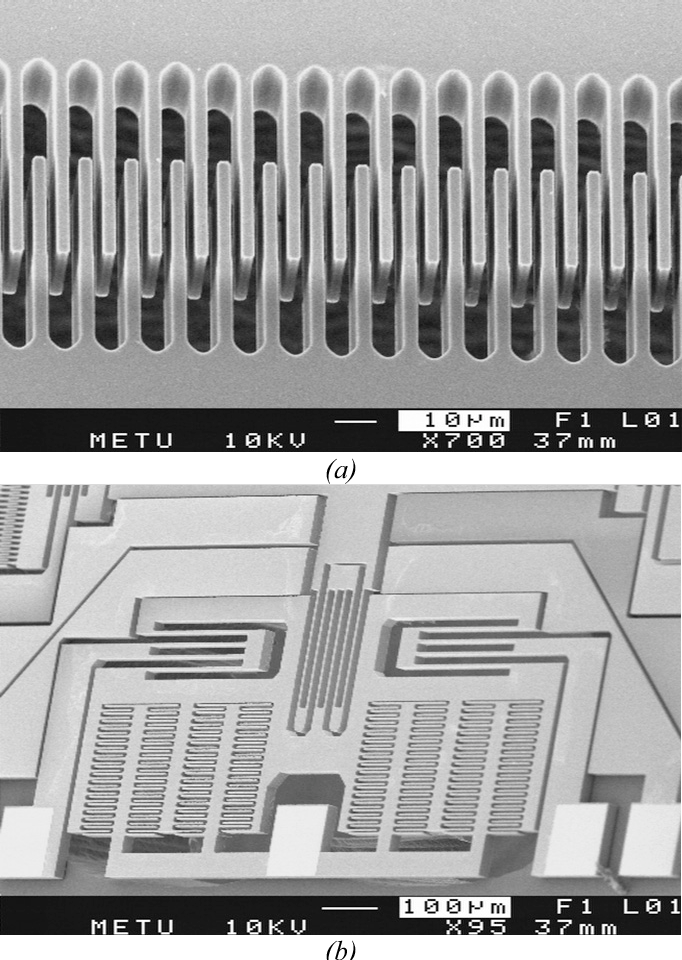
Spannungsschwankungen (Schwankungen) sind tatsächlich analoge Wellen, die zur Verarbeitung durch die Flugsteuerung in digitale Informationen umgewandelt werden. Wenn wir 8k Gyro sagen, bedeutet dies, dass 8000 Mal pro Sekunde das analoge Signal in digital umgewandelt und von der Steuerung, der Firmware, in diesem Fall Betaflight, verarbeitet wird.
Lärm
Lärm ist ein Begriff, den wir oft hören, aber was ist das? In der Regel stellen wir uns im nächsten 23-stöckigen Ameisenhaufen sofort Geräuschgeräusche oder laute Umgebungen vor.
Das Gyroskop und der PID-Regler haben ein ähnliches Problem. Da sich das Gyroskop auf dem Flugregler befindet, der am Rahmen angebracht ist, tritt Rauschen auf. Geräusche können auftreten von: Motoren, Propellern, Windgeschwindigkeit, allgemeinen Rahmengeräuschen, Elektronik usw.
PID-Regler
Der PID-Regler ist ein System, das die Position des Quadcopters an die Sticks (Ihre Steuerung) oder eine bestimmte Position (wie auch immer) anpasst. Die PID wird durch 3 Parameter eingestellt - P, I und D. Leider werden wir in diesem Artikel die PID-Abstimmung nicht im Detail betrachten. Wenn Sie ein Pilot sind, wissen Sie bereits, und wenn Sie ein Anfänger sind, wird es einen separaten Artikel zu diesem Thema geben.
Dieses System funktioniert gut, wenn die Geräuschentwicklung minimal ist. Andernfalls können Probleme wie Schwingungen (Vibrationen) oder Überhitzung der Motoren auftreten.
Der Begriff d in einem PID-Regler bezieht sich insbesondere auf Rauschen. D glättet schnelle Bewegungen, aber die Berechnung von D im PID-Regler erhöht das Rauschen im Signal erheblich. Dies bedeutet, dass das Rauschen des Gyroskops durch den D-Term-Wert erheblich verstärkt wird und wir daher an zwei Stellen filtern - dem Gyroskop und D.
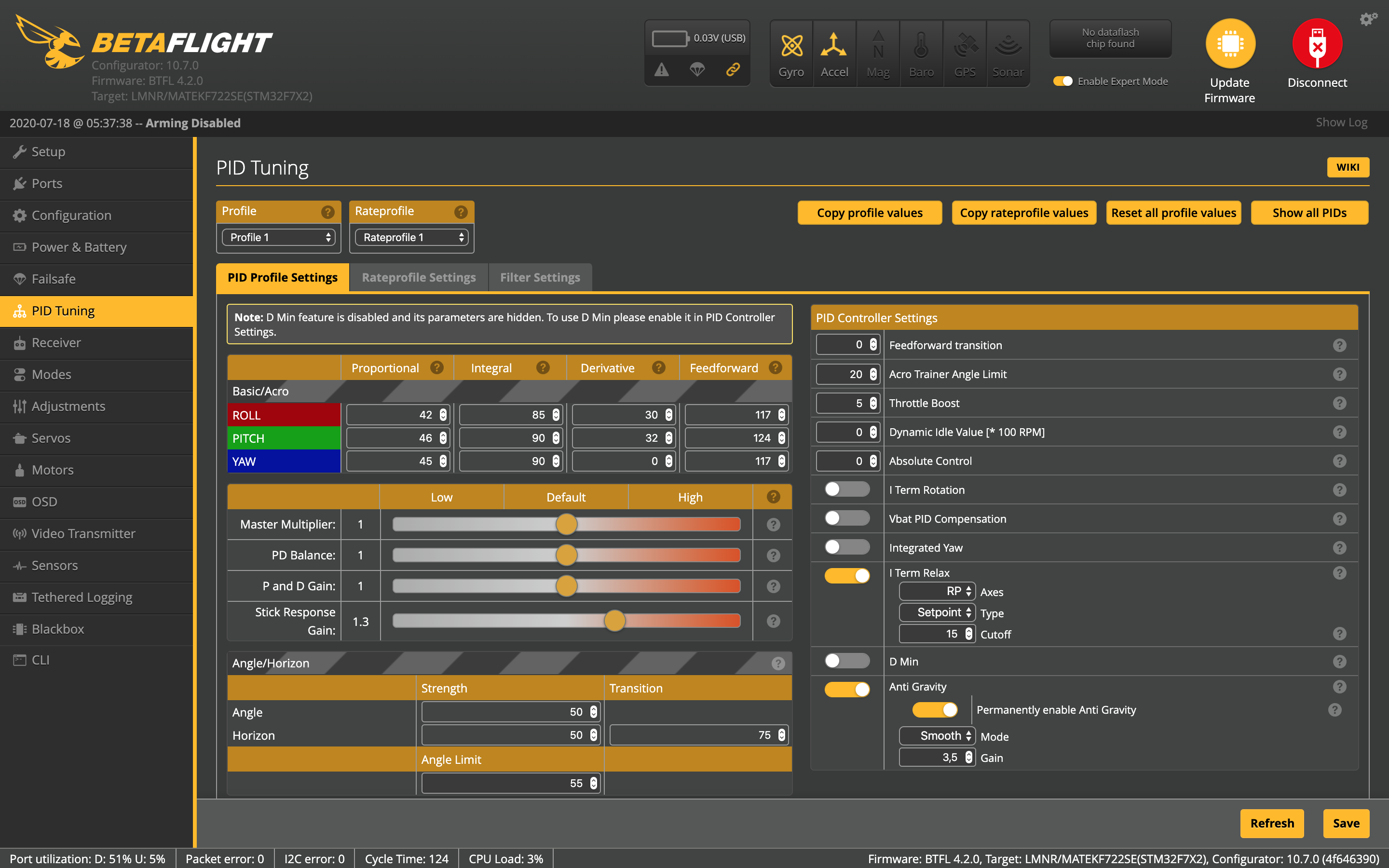
Als Beispiel für einen solchen Anstieg zeige ich Ihnen die folgenden Protokolle:
Erster Graph - Gyroskop
Zweiter Graph - PID
Dritter - Motoren
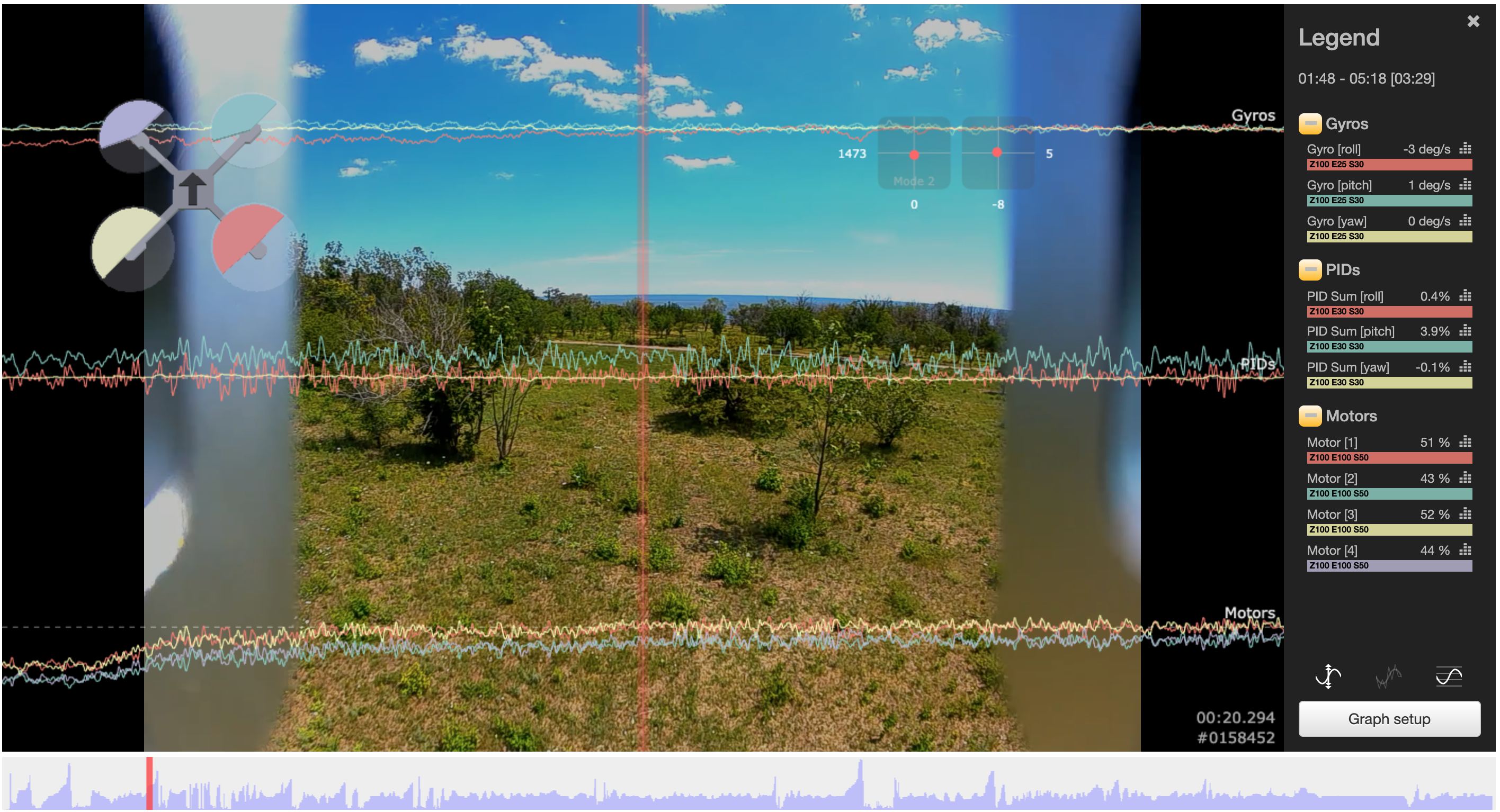
(dies sind normale Propeller (mit einer leicht reduzierten Filterung)
(Wie Sie sehen können, werden Vibrationen von schlechten Propellern in der Phase des PID-Reglers verstärkt, was zu einer übermäßigen Belastung der Motoren führt. Es handelt sich buchstäblich um Wurst.)
Screenshots von - Blackbox Explorer .
Filtration
Der Filterprozess besteht darin, überschüssiges Rauschen aus dem Signal vom Gyroskop zu entfernen. Aber wie viel Signal vom Gyroskop wollen wir behalten und wie viel herausfiltern?
Ehrlich gesagt kann ich es Ihnen nicht in Farben sagen, aber es ist so passiert, dass im Beta-Flug Geräusche oder eher Vibrationen in Hz gemessen werden. 1 Hz - eine Umdrehung pro Sekunde. Dies geschieht zur Vereinfachung der Visualisierung und zur Arbeit mit diesen Variablen. Turbulenzen werden auch technisch als "Rotationsänderungsrate" bezeichnet - die Frequenz der Rotationsänderungsrate.
Die Geschwindigkeit des Quadcopters liegt im Bereich von 0-30 Hz. Oberhalb von 30 Hz bis 80 Hz haben wir eine Propwash, wenn der Quadcopter in seinen eigenen Strömen vor Turbulenzen wackelt. Informationen im Bereich von 0 bis 80 Hz sind für den PID-Regler wichtig, daher werden wir sie nicht berühren.
Mit PIDtoolbox Sie können diese Karten ziehen:

Tiefpass
Filter

Wie die vorherige Grafik zeigt, enthält das Signal vom Gyroskop Informationen von 0 Hz bis 1000 Hz, aber wir interessieren uns nur für den Bereich von 0 bis 80 Hz, da dies die tatsächliche Bewegung des Quadcopters ist, über die der PID-Regler Bescheid wissen sollte. Wir brauchen also eine Filterlösung, damit niedrige Frequenzen den PID-Regler passieren können, während hohe Frequenzen gedämpft werden, und dafür können wir einen Tiefpassfilter verwenden.
Tiefpassfilter lassen niederfrequente Signale durch und dämpfen hohe Frequenzen, die meist nur Rauschen sind.
Die Grenzfrequenz wird eingestellt und die Steuerung reduziert einfach Signale über dieser Frequenz. Dämpfungskurveermöglicht es Ihnen, nicht alles unter einem sauberen zu schneiden, und je höher die Frequenz des Rauschens ist, desto mehr tritt seine Dämpfung reibungslos auf.
Piloten machen oft den Fehler, einen solchen Filter auf die gleiche Frequenz wie das sichtbare Rauschen einzustellen. Zum Beispiel bei 200Hz. Da der Filter das Rauschen gleichmäßig dämpft, führt die Installation eines solchen Filters nicht zu vielen Ergebnissen. Der Filter sollte auf niedrigere Frequenzen eingestellt werden. Vielleicht sogar bei 80Hz.
Je niedriger Sie einen solchen Filter installieren, desto mehr Filterung erfolgt.
Beim Einrichten der Filterung ist eine einfache Sache zu beachten. Je mehr gefiltert wird, desto größer ist die Verzögerung. Es ist klar, dass es in Millisekunden und nicht signifikant ist, aber für einen PID-Regler ist es kritisch. Da es später auf Ereignisse reagiert, was bedeutet, dass es versucht, den Quadcopter in der Vergangenheit auszurichten :)
Notch-Filter
Notch bedeutet Notch, tatsächlich sieht es so aus: Die
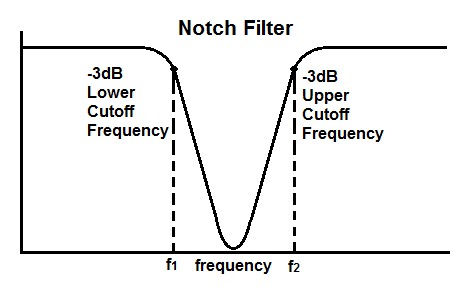
Filter werfen einen Teil des Rauschens unten und einen Teil des Rauschens oben weg . Seit Betaflight 3.1 sind diese Filter dynamisch und passen sich unterschiedlichen Geräuschpegeln an.
Die Filter werden in Verbindung mit Tiefpassfiltern verwendet, sie werden jedoch bereits verwendet, um das Geräusch der oben befindlichen Motoren zu filtern.
D-Term-Filterung
Wie oben erwähnt, kann D das Rauschen des Gyroskops multiplizieren, sodass Betaflight über eine D-Filterung verfügt. Unten auf den Bünden können Sie den Rauschpegel vor und nach der Filterung sehen.
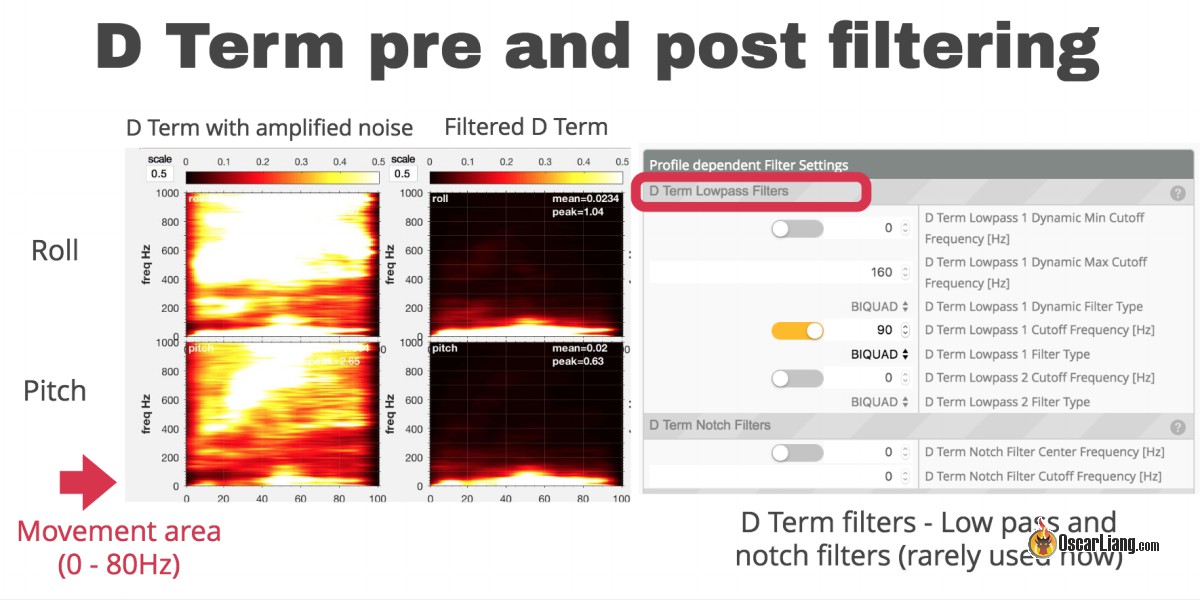
In der Community gibt es kein klares Verständnis, ob D stark gefiltert werden soll oder nicht. Es gibt jedoch die Regel für heiße Motoren: Je weniger Filtration und je höher D, desto mehr erwärmen sie sich und können sogar ausbrennen. Aber in die entgegengesetzte Richtung bekommen wir eine Verzögerung.
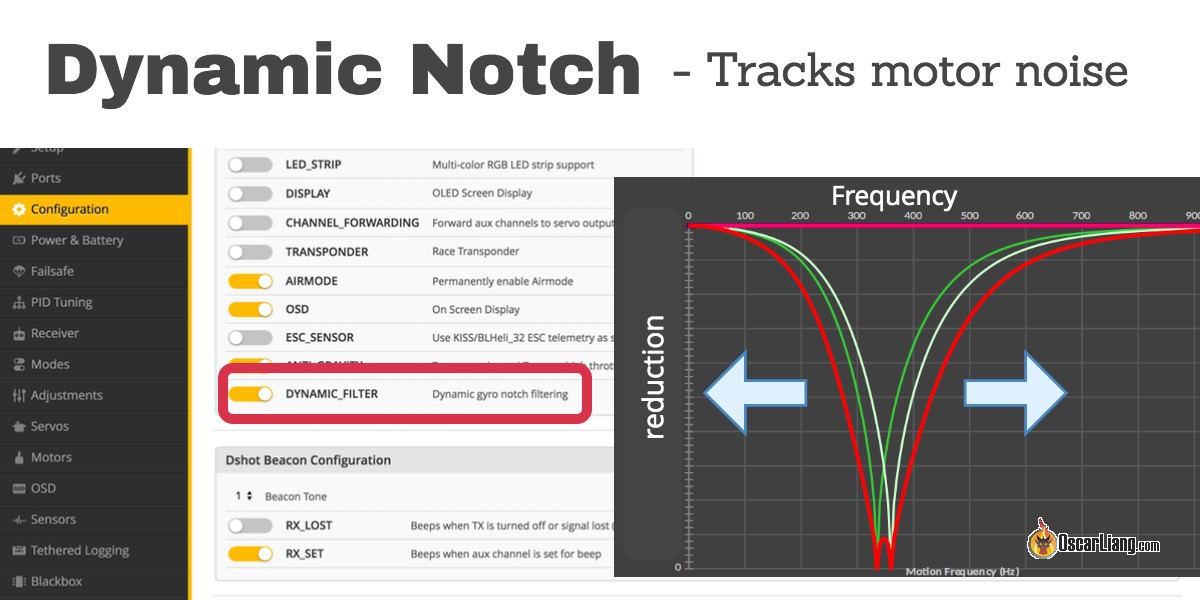
Drehzahlfilter
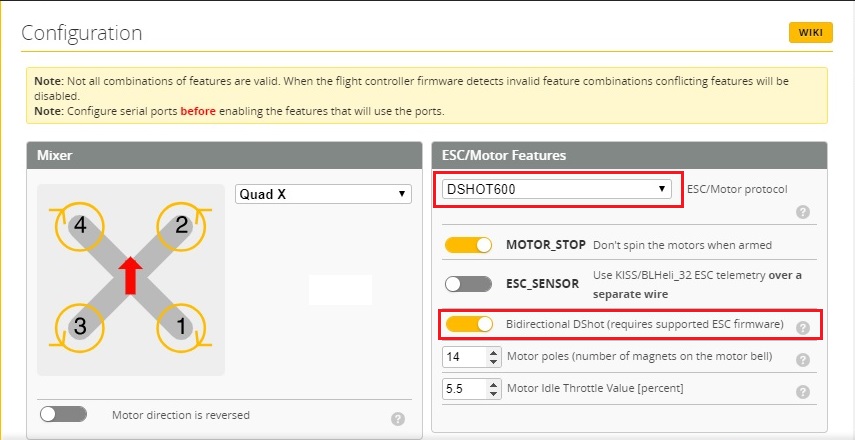
Also, was ich anfing, neu zu verwenden, ist RPM-Filterung. Es arbeitet mit einem Zwei-Wege-DSHOT-Protokoll, mit dem der Flugregler die genaue Drehzahl eines bestimmten Motors ermitteln kann. Basierend auf diesen Daten wird eine Filterung angewendet.
(Ihr ESC muss doppelseitiges DHSOT unterstützen.)
Firmware für ESC ab 3.7
Wenn die Motoren heiß sind, ist dies ein Problem. Heiße Motoren können ein Zeichen dafür sein, dass die Motoren viel Lärm bekommen und versuchen, so oft auf Vibrationen zu reagieren, dass Wärme erzeugt wird.
Motoren können aus verschiedenen Gründen warm werden, z. B. aufgrund eines alten Rahmens, verbogener Glocken an den Motoren, unausgeglichener Balance und zusätzlicher Bomben auf Ihrer Drohne.
Natürlich ist es besser, wie sie sagen, sauber zu bauen und dass alles neu wäre, aber Sie können zuerst versuchen, die Filterung einzurichten.
Zunächst können Sie die Filterung D in Schritten von 20 Hz erhöhen. Überprüfen Sie die Temperatur nach jedem solchen Schritt und finden Sie Ihren optimalen Bereich.
Und Sie sollten zwischen der Temperatur der Motoren und den Vibrationen suchen. Wie oben erwähnt, kann die Filterung zwar das Rauschen reduzieren, jedoch einige Verzögerungen verursachen und der PID-Regler kann möglicherweise nicht mithalten. Und egal wie lustig es ist, Vibrationen zu verursachen. Aber diese Schwingungen gehören nicht zum Propwash. Dies ist nur eine ineffiziente PID-Operation.
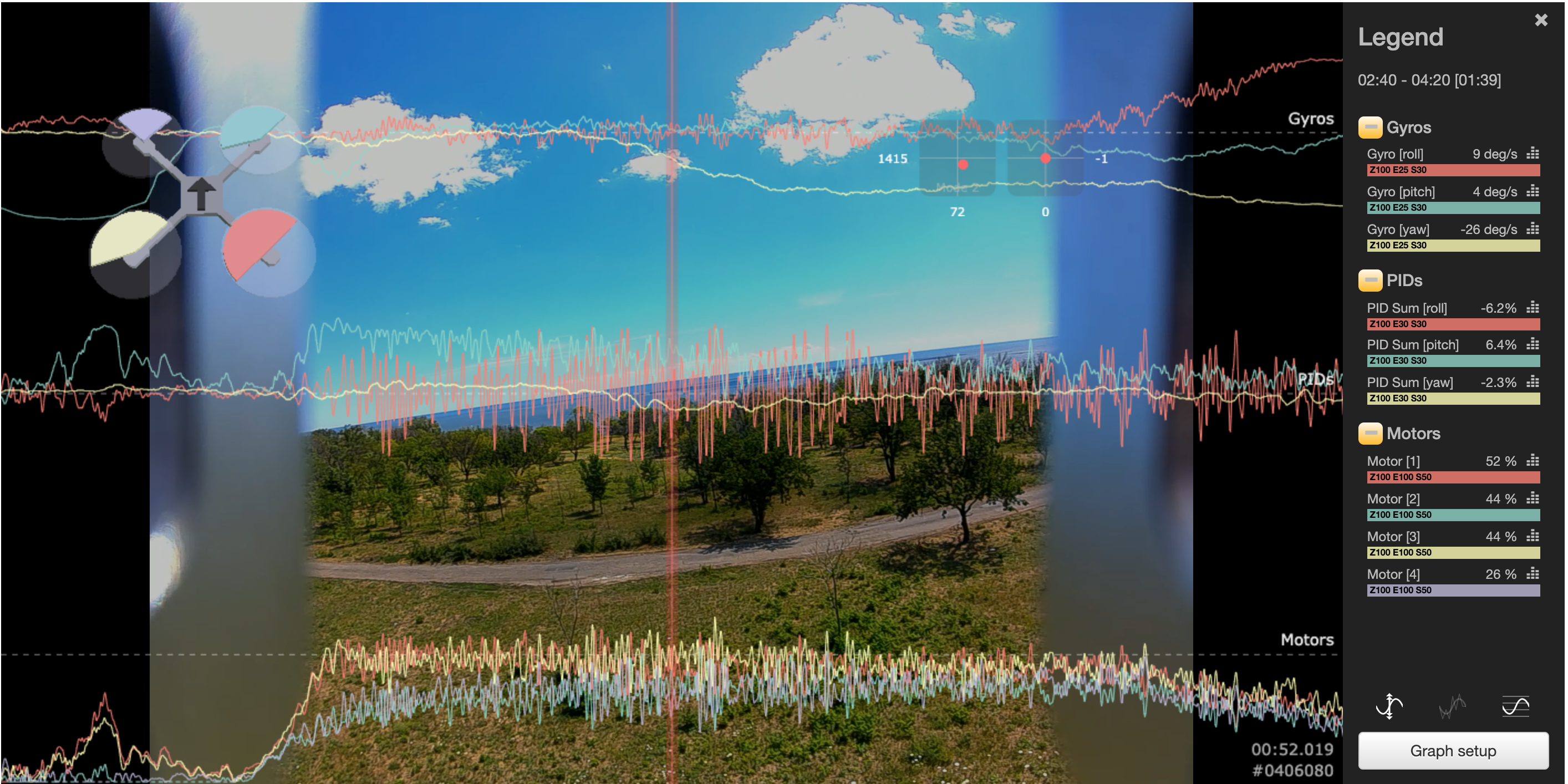
Neuere Versionen von Betaflight verfügen über Schieberegler. Versuchen Sie, die Werte der Filter selbst nicht zu ändern, sondern verwenden Sie diese "Master" -Schieberegler.
Im Moment habe ich solche Einstellungen mit aktiviertem Drehzahlfilter. Vielleicht werde ich versuchen, die Filterung noch weiter zu reduzieren:
