Ich entwickle weiterhin eine vollständige Vorlagenbibliothek für Stm32-Mikrocontroller. Im letzten Artikel habe ich über die erfolgreiche (fast) Implementierung eines HID-Geräts gesprochen. Eine weitere beliebte USB-Klasse ist der Virtual COM Port (VCP) der CDC-Klasse. Die Popularität erklärt sich aus der Tatsache, dass der Datenaustausch auf die gleiche Weise wie das übliche und einfache serielle UART-Protokoll erfolgt, jedoch keine separate Konverter im Gerät installiert werden muss.
Schnittstellen
Ein CDC-Gerät muss zwei Schnittstellen unterstützen: eine Schnittstelle zum Verwalten von Verbindungsparametern und eine Schnittstelle zum Datenaustausch.
Die Verwaltungsschnittstelle ist eine Erweiterung der Basisklasse der Schnittstelle, mit dem Unterschied, dass sie einen Endpunkt enthält (obwohl Sie meines Wissens, ohne alle Funktionen unterstützen zu müssen, überhaupt auf den Endpunkt verzichten können) und a Satz von "Funktionen", die die Fähigkeiten des Geräts bestimmen. Im Rahmen der entwickelten Bibliothek wird diese Schnittstelle durch folgende Klasse dargestellt:
template <uint8_t _Number, uint8_t _AlternateSetting, uint8_t _SubClass, uint8_t _Protocol, typename _Ep0, typename _Endpoint, typename... _Functionals>
class CdcCommInterface : public Interface<_Number, _AlternateSetting, DeviceAndInterfaceClass::Comm, _SubClass, _Protocol, _Ep0, _Endpoint>
{
using Base = Interface<_Number, _AlternateSetting, DeviceAndInterfaceClass::Comm, _SubClass, _Protocol, _Ep0, _Endpoint>;
static LineCoding _lineCoding;
...
Im Basisfall sollte die Schnittstelle drei Setup-Pakete unterstützen:
SET_LINE_CODING: Einstellen der Zeilenparameter: Baudrate, Stoppbits, Parität, Datenbits. Einige Projekte, auf die ich abzielte ( dieses Projekt war die Hauptinspirationsquelle ), ignorieren dieses Paket. In diesem Fall weigern sich jedoch einige Terminals (z. B. Putty ) zu arbeiten.
GET_LINE_CODING: , .
SET_CONTROL_LINE_STATE: (RTS, DTR ..).
setup-:
switch (static_cast<CdcRequest>(setup->Request))
{
case CdcRequest::SetLineCoding:
if(setup->Length == 7)
{
// Wait line coding
_Ep0::SetOutDataTransferCallback([]{
memcpy(&_lineCoding, reinterpret_cast<const void*>(_Ep0::RxBuffer), 7);
_Ep0::ResetOutDataTransferCallback();
_Ep0::SendZLP();
});
_Ep0::SetRxStatus(EndpointStatus::Valid);
}
break;
case CdcRequest::GetLineCoding:
_Ep0::SendData(&_lineCoding, sizeof(LineCoding));
break;
case CdcRequest::SetControlLineState:
_Ep0::SendZLP();
break;
default:
break;
}
, , variadic-, :
static uint16_t FillDescriptor(InterfaceDescriptor* descriptor)
{
uint16_t totalLength = sizeof(InterfaceDescriptor);
*descriptor = InterfaceDescriptor {
.Number = _Number,
.AlternateSetting = _AlternateSetting,
.EndpointsCount = Base::EndpointsCount,
.Class = DeviceAndInterfaceClass::Comm,
.SubClass = _SubClass,
.Protocol = _Protocol
};
uint8_t* functionalDescriptors = reinterpret_cast<uint8_t*>(descriptor);
((totalLength += _Functionals::FillDescriptor(&functionalDescriptors[totalLength])), ...);
EndpointDescriptor* endpointDescriptors = reinterpret_cast<EndpointDescriptor*>(&functionalDescriptors[totalLength]);
totalLength += _Endpoint::FillDescriptor(endpointDescriptors);
return totalLength;
}
, , , , ( ). :
template <uint8_t _Number, uint8_t _AlternateSetting, uint8_t _SubClass, uint8_t _Protocol, typename _Ep0, typename _Endpoint>
class CdcDataInterface : public Interface<_Number, _AlternateSetting, DeviceAndInterfaceClass::CdcData, _SubClass, _Protocol, _Ep0, _Endpoint>
{
using Base = Interface<_Number, _AlternateSetting, DeviceAndInterfaceClass::CdcData, _SubClass, _Protocol, _Ep0, _Endpoint>;
...
CDC- , , 4 : Header, CallManagement, ACM, Union, :
template<uint8_t _Number, typename _Ep0, typename _Endpoint>
using DefaultCdcCommInterface = CdcCommInterface<_Number, 0, 0x02, 0x01, _Ep0, _Endpoint, HeaderFunctional, CallManagementFunctional, AcmFunctional, UnionFunctional>;
(Interrupt Bulk ), , , , :
using CdcCommEndpointBase = InEndpointBase<1, EndpointType::Interrupt, 8, 0xff>;
using CdcDataEndpointBase = BidirectionalEndpointBase<2, EndpointType::Bulk, 32, 0>;
using EpInitializer = EndpointsInitializer<DefaultEp0, CdcCommEndpointBase, CdcDataEndpointBase>;
using Ep0 = EpInitializer::ExtendEndpoint<DefaultEp0>;
using CdcCommEndpoint = EpInitializer::ExtendEndpoint<CdcCommEndpointBase>;
using CdcDataEndpoint = EpInitializer::ExtendEndpoint<CdcDataEndpointBase>;
using CdcComm = DefaultCdcCommInterface<0, Ep0, CdcCommEndpoint>;
using CdcData = CdcDataInterface<1, 0, 0, 0, Ep0, CdcDataEndpoint>;
using Config = Configuration<0, 250, false, false, CdcComm, CdcData>;
using MyDevice = Device<0x0200, DeviceAndInterfaceClass::Comm, 0, 0, 0x0483, 0x5711, 0, Ep0, Config>;
, ( ):
template<>
void CdcDataEndpoint::HandleRx()
{
uint8_t* data = reinterpret_cast<uint8_t*>(CdcDataEndpoint::RxBuffer);
uint8_t size = CdcDataEndpoint::RxBufferCount::Get();
if(size > 0)
{
if(data[0] == '0')
{
Led::Clear();
CdcDataEndpoint::SendData("LED is turn off\r\n", 17);
}
if(data[0] == '1')
{
Led::Set();
CdcDataEndpoint::SendData("LED is turn on\r\n", 16);
}
}
CdcDataEndpoint::SetRxStatus(EndpointStatus::Valid);
}
, - USB-, , .
, . , , Seale Logic , . , , , .
WireShark UsbPcap , , . , - . : : "!(usb.addr == "1.1.1" || usb.addr == "1.2.1" || usb.addr == "1.1.3" || usb.addr == "1.5.1" || usb.addr == "1.5.2" || ..)" ( , ). :
. , PID, GET_DEVICE_DESCRIPTOR. : "usb.idProduct == 0x5711". .
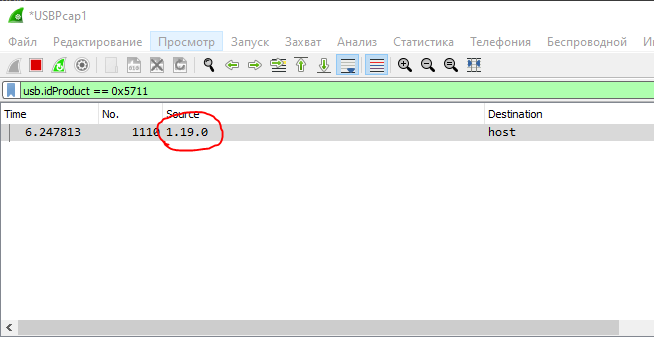
contains. , , (, , ). : "usb.addr contains "1.19"".

, UsbPcap , , .
usbpcap
SSD, Windows 10 To Go (Windows, ). Microsoft , . , , ( ) .
Windows "inaccessible boot device". , , . . , , . , WireShark usbpcap. , / usbpcap. LiveCD Windows . 100%, : Windows , usbpcap, USB, BSOD. , .
Ich habe den geschriebenen Code im Programm Terminal v1.9b getestet. Der Screenshot zeigt das Ergebnis des Sendens der Nachrichten "0" und "1" an das Gerät.

Der vollständige Beispielcode kann im Repository angezeigt werden . Beispiel getestet auf STM32F072B-DISCO. Wie bei HID hat die umfangreiche Bibliothek (insbesondere der Endpoint Manager) die Implementierung der CDC-Unterstützung erheblich vereinfacht, und die Fertigstellung dauerte etwa einen ganzen Tag. Als nächstes plane ich, eine weitere Klasse für Massenspeichergeräte hinzuzufügen, und ich kann dort wahrscheinlich aufhören. Fragen und Kommentare sind willkommen.