
Die Arbeit eines neuronalen Netzwerks basiert auf Matrixmanipulation. Für das Training werden verschiedene Methoden verwendet, von denen viele aus der Gradientenabstiegsmethode hervorgegangen sind, bei der es erforderlich ist, mit Matrizen umgehen zu können, um Gradienten (Ableitungen in Bezug auf Matrizen) zu berechnen. Wenn Sie unter die Haube eines neuronalen Netzwerks schauen, sehen Sie Matrizenketten, die oft einschüchternd wirken. Einfach ausgedrückt: „Die Matrix wartet auf uns alle“. Es ist Zeit, sich besser kennenzulernen.
Dazu führen wir folgende Schritte aus:
: , , ;
;
.
NumPy . , , , , . , , , - , , , . , - : , .
-
- , , , . , , , Google TensorFlow.
, , , , ,  ,
,  ;
;  - .
- .
import numpy as np # numpy
a=np.array([1,2,5])
a.ndim # , = 1
a.shape # (3,)
a.shape[0] # = 3
 . , , 0 2 .
. , , 0 2 .
b=np.array([3,4,7])
np.dot(a,b) # = 46
a*b # array([ 3, 8, 35])
np.sum(a*b) # = 46
( ) -  ,
,  . ,
. ,  - 0- 2- . , .
- 0- 2- . , .
A=np.array([[ 1, 2, 3],
[ 2, 4, 6]])
A # array([[1, 2, 3],
# [2, 4, 6]])
A[0, 2] # , = 3
A.shape # (2, 3) 2 , 3


 ,
,  . ,
. , 
 (
( 
 )
)
B=np.array([[7, 8, 1, 3],
[5, 4, 2, 7],
[3, 6, 9, 4]])
A.shape[1] == B.shape[0] # true
A.shape[1], B.shape[0] # (3, 3)
A.shape, B.shape # ((2, 3), (3, 4))
C = np.dot(A, B)
C # array([[26, 34, 32, 29],
# [52, 68, 64, 58]]);
# , C[0,1]=A[0,0]B[0,1]+ A[0,1]B[1,1]+A[0,2]B[2,1]=1*8+2*4+3*6=34
C.shape # (2, 4)
 , :
, :
np.dot(B, A) # ValueError: shapes (3,4) and (2,3) not aligned: 4 (dim 1) != 2 (dim 0)

 , .
, .
, . , 
 .
.  . , , ,
. , , ,  ,
,  - ( NumPy).
- ( NumPy).  . ,
. ,  .
.
a = np.reshape(a, (3,1)) # , a.shape = (3,) (3,1),
b = np.reshape(b, (3,1)) # ,
D = np.dot(a,b.T)
D # array([[ 3, 4, 7],
# [ 6, 8, 14],
# [15, 20, 35]])
, . , .
, , . (cost function). , . . , (learning rate), , (epoch). , . (), . . , , , .

- (samples) . . , (), ( ) - (samples), - (features).
, ( ). (, …) , , . , .
!
, , . , “ ” . , , . , , . , , , .
, 10 . , (10, 3). “ ”, . , . , :
, , 0 50 ;
X=np.random.randint(0, 50, (10, 3))
0 1;
X=np.random.rand(10, 3)

 . , ,
. , ,  ;
;X=4*np.random.randn(10, 3) + 2

 , .
, .
, 

 , . , , . , , ,
, . , , . , , , 
 . ,
. ,  . ,
. , 
 , - - , . . ,
, - - , . . , 
 (
(  ,
,  )
)  ,
,  ,
,  ; , ,
; , ,  , . ,
, . ,  ,
,  . ,
. ,  . ,
. ,  10- (samples) . :
10- (samples) . :

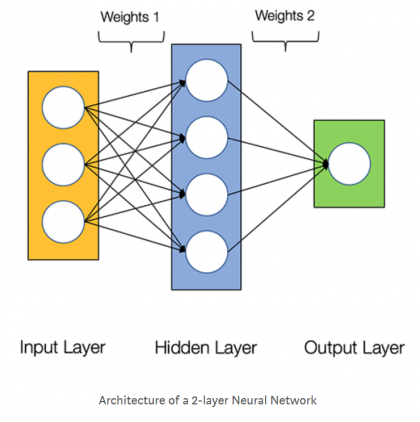
, . (bias).
. : , , , .
X=np.random.randint(0, 50, (10, 3))
w1=2*np.random.rand(3,4)-1 # -1 +1
w2=2*np.random.rand(4,1)-1
Y=np.dot(np.dot(x,w1),w2) #
Y.shape # (10, 1)
Y.T.shape # (1, 10)
(np.dot(Y.T,Y)).shape # (1, 1), ,
. -1 +1, “” ( ).
.  “ ”, - .
“ ”, - .



 - ,
- ,  . ,
. ,  .
.
, . .
. - . , . , .
- , . 
 , “ ” - . , , . , , . : - , , - . (, 16 ), , . . ,
, “ ” - . , , . , , . : - , , - . (, 16 ), , . . , , , ,
, , ,  , . , .
, . , .


 - (learning rate). , . . - , , . , - .
- (learning rate). , . . - , , . , - .
.

 -
-  . ,
. ,  ,
,  . : .
. : .

, ,  , .
, .
. . , , .
,  ,
,

,  . , :
. , :


, , ,  .
. 
 , -
, -  .
. 
 -
-  . ,
. , 
 , .
, .
deltaW2=2*np.dot(np.dot(X,w1).T,Y)
deltaW2.shape # (4,1)
 .
.


, “ ”, “ ” - 
 . , , . : “” ( ), , .
. , , . : “” ( ), , .
 :
:  .
.
. ,, , , . . , . , . , , :  ,
, 

 .
.
,

:

 , . ,
, . ,

,

, - .  :
:  ,
,  . ,
. ,

“*” . , 
 , ,
, ,  , ; ,
, ; ,  .
.
. 
 . , , . NumPy .
. , , . NumPy .
def f1(x): #
return np.power(x,2)
def graf1(x): #
return 2*x
def f2(x): #
return np.power(x,3)
def gradf2(x): #
return 3*np.power(x,2)
A=np.dot(X,w1) #
B=f1(A) #
C=np.dot(B,w2) #
Y=f2() #
deltaW2=2*np.dot(B.T, Y*gradf2(C))
deltaW2.shape # (4,1)
 , . - .
, . - .

 . :
. :


,


,  ,
, 
 , “”,
, “”,  .
.
“” ,

![\ delta W ^ {(1)} = 2 (XT) \ cdot [[(\ widetilde {Y} * f_2 ^ {'} (C)) \ cdot (W ^ {(2)}. T)] * f_1 ^ {'} (A)].](https://habrastorage.org/getpro/habr/upload_files/cfb/a83/1aa/cfba831aa8bf857c4c5a7d0da07a17cc.svg)
,  ,
,  ,
,  .
.
.
deltaW1=2*np.dot(X.T, np.dot(Y*gradf2(C),w2.T)*gradf1(A))
deltaW1.shape # (3,4)
. .
“, - . -!” ? , , , . , . - , , . ! , , - . , , .
, . James Loy - , , , , , . . , , , . “-”, , , . , TensorFlow Keras. , die Originalquelle (es gibt eine Übersetzung ins Russische).
Schreiben Sie Codes, vertiefen Sie sich in Formeln, lesen Sie Bücher, stellen Sie sich Fragen.
Die Werkzeuge sind Jupyter Notebook ( Anaconda- Regeln!), Colab ...