Warum habe ich mich entschieden, diesen Beitrag zu schreiben?
Natürlich können Sie die Originalanweisungen für die Installation von ROS Noetic im ROS-Wiki sehen , aber alles ist auf Englisch und wird sehr vage erklärt, aber ich werde versuchen, es Ihnen so klar wie möglich zu erklären. Also fangen wir an.
Was ist ROS?
ROS - Robot Operating System, ein Framework zum Programmieren von Robotern, das Funktionen für verteilte Arbeit bietet. ROS wurde ursprünglich 2007 unter dem Namen Switchyard im Artificial Intelligence Lab der Stanford University entwickelt.
Kann ROS Noetic auf anderen Ubuntu-Versionen installiert werden?
Es gibt keine richtige Antwort auf diese Frage. Es scheint, dass einzelne Noetic-Pakete auf anderen Versionen des Betriebssystems installiert werden können, aber ihre Stabilität ist nicht garantiert. Daher ist höchstwahrscheinlich nicht alles. Kommen wir also zur Installation selbst.
Was ist, wenn ich eine andere Version von Ubuntu verwende?
ROS wurde in verschiedenen Versionen entwickelt, die auf verschiedenen Versionen von Ubuntu installiert sind.
Ubuntu-Version |
ROS-Version |
Ubuntu 15.04 & 16.04 |
Ros kenetisch |
Ubuntu 18.04 |
ROS Melodic |
Ubuntu 20.04 |
ROS Noetik |
ROS Ubuntu? ! noetic , ros-noetic
, ros-melodic
.
, :
Main - , Canonical.
Universe - , .
Restricted - .
Multiverse - , .
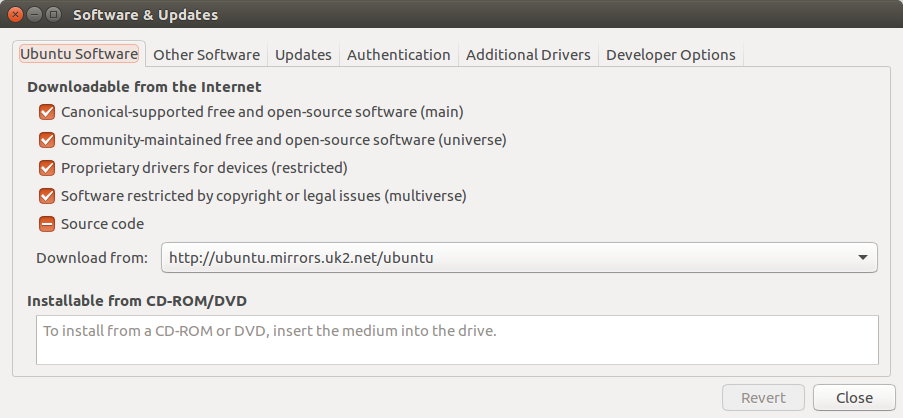
, . " Ubuntu" "Ubuntu Software" ,
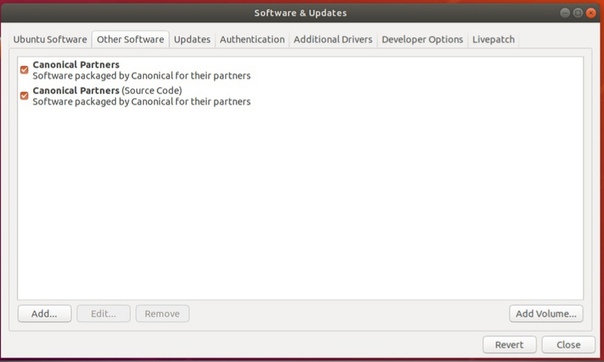
"Other sowtware" Canonical Parthners Canonical Parthners(source code)
ROS
ROS Noetic
1
. packages.ros.org . :
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $ (lsb_release -sc) main"> /etc/apt/sources.list.d/ros-latest.list'
. :
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
curl apt-key, , -:
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -
2
-
sudo apt-get update
3
. , ROS :
Desktop Full - , . , : 2D/3D . , :
sudo apt install ros-noetic-desktop-full
2. Desktop Instal - ROS, rqt rviz.
sudo apt install ros-noetic-desktop
3. ROS-Base: (Bare Bones) - ROS. , . :
sudo apt install ros-noetic-ros-base
- ROS :
sudo apt install ros-noetic-_
4
bash, ROS. :
source /opt/ros/noetic/setup.bash
5
, ROS. ROS , . , rosinstall - , ROS . :
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
6
Bevor Sie viele der ROS-Tools verwenden können, müssen Sie rosdep initialisieren . Es ermöglicht Ihnen die einfache Installation von Systemabhängigkeiten für den Quellcode, den Sie kompilieren möchten, und ist erforderlich, um einige der Kernkomponenten in ROS auszuführen. Wenn Sie rosdep noch nicht installiert haben , ist es Zeit, es zu installieren. Schreiben Sie dazu in das Terminal:
sudo apt python3-rosdep
Schritt 7
Um rosdep zu initialisieren , schreiben Sie in das Terminal:
sudo rosdep init
Und dann schreiben wir folgendes:
rosdep update
GESAMT
Herzlichen Glückwunsch zur Installation von ROS Noetic. Sie können jetzt mit ROS Ihre eigenen Roboter programmieren.