
Das Gameplay des Fahrzeugsimulators besteht darin, die Bewegung eines Objekts im Raum mit einer Reihe von Freiheitsgraden zu steuern. Die Aktionen des Spielers ändern den Vektor des momentanen Zustands des Systems in die gewünschte oder nicht ganz gewünschte Richtung. Es ist unwahrscheinlich, dass das Spiel interessant ist, wenn das Objekt schlecht an die Kontrolle des Spielers angepasst ist.
Die Anpassungsfähigkeit eines technischen Systems an die menschliche Kontrolle ( Kontrollierbarkeit ) ist ein ziemlich komplexes und vielfältiges Merkmal. Das mathematische Modell des Verhaltens eines gesteuerten Objekts wird in der Theorie der automatischen Steuerung (TAU) behandelt. Die in TAU verwendeten Modelle können auch das Verhalten des Spielers beschreiben - "Mensch-Bediener" - und "Mensch-Maschine" -Systeme.
Es ist zu beachten, dass die erstellten menschlichen Modelle immer für einen begrenzten Bereich von Bedingungen relevant sind. Aus diesem Grund geht die Lösung praktischer Probleme im Bereich der Steuerbarkeit häufig über den Rahmen der TAU hinaus.
Die Steuerbarkeit einer Maschine bezieht sich auf ihre ergonomischen Eigenschaften, die isoliert vom Kontext menschlicher Aktivitäten ihre Bedeutung verlieren. Im Rahmen des Schnitts wird ein Ansatz zum Einrichten eines Simulatormodells vorgestellt, der auf einer experimentellen Untersuchung des Spielprozesses basiert.
Für Simulatoren, die behaupten, vorhandene Systeme genau zu simulieren, ist die Ähnlichkeit mit dem Prototyp wichtig, unabhängig davon, wie schlecht das Handling ist. Die Optimierung derselben Eigenschaften ist relevant für Spiele ohne ein bestimmtes Modell, z. B. Simulatoren für fantastische Objekte.
Abgesehen von dem Problem der Simulation eines realen Objekts mit einem bestimmten Satz von Merkmalen stellen wir fest, dass der Simulator durch das Vorhandensein einer subjektiv bestimmten Körperlichkeit sicherlich nicht verlieren wird. Mit anderen Worten, selbst ein Objekt, das in der Natur nicht existiert, kann den Erwartungen des Spielers hinsichtlich seines (Objekt-) Verhaltens entsprechen oder nicht. Der Faktor des natürlichen Verhaltens des Objekts muss berücksichtigt werden.
Formulierung des Problems
Für den Simulator ist es notwendig, die Koeffizienten des mathematischen Modells des Fahrzeugs anzupassen, um sein bestes Handling sicherzustellen. Die Optimierung sollte basierend auf experimentellen Daten durchgeführt werden. Es ist wünschenswert, ein Modell zu erhalten, das für den Spieler natürlich aussieht.
Systembeschreibung
In unseren Experimenten werden wir einen Simulator mit 3D- Grafiken verwenden.
Die Komplexität des mathematischen Modells eines realen Fahrzeugs ist nur durch den akzeptierten Abstraktionsgrad und die Rauheit der verwendeten Annahmen begrenzt. Die Komplexität des Modells in dem hier zu lösenden Problem wird durch die rationale Ebene der Natürlichkeit des Spiels bestimmt.
Die folgenden Vereinfachungen werden im Folgenden angewendet:
1. Die Bewegungsrichtung des Objekts stimmt mit seiner Längsachse überein.
2. Die Rotationsbewegung eines Objekts kann als die Summe unabhängiger Komponenten betrachtet werden - Rotationsbewegungen relativ zu den drei Achsen des Koordinatensystems (CCS), die dem Objekt zugeordnet sind.
3. Die Winkelbeschleunigung in einem separaten Steuerkanal (um eine separate CCS-Achse) wird durch eine lineare Kombination der aktuellen Werte der Steueraktion und der Winkelgeschwindigkeit in diesem Kanal bestimmt.
Die Akzeptanz der ersten Vereinfachung bei der Modellierung realer Objekte wird durch die Eigenschaften des Systems und das zu lösende Problem bestimmt. Eine bekannte Eigenschaft von Darts ist beispielsweise ihre Fähigkeit zu fliegen, nachdem sie "mit einem Punkt nach vorne" geworfen wurden. Dieses einfache Modell reicht aus, um eine nützliche Schlussfolgerung zu ziehen: Wirf den Pfeil nicht über dich.

Wenn jedoch ein genaues Modell benötigt wird, um die Folgen des Kontakts eines Pfeils mit einem Ziel zu bestimmen, sollte berücksichtigt werden, dass sein Geschwindigkeitsvektor im Flug einen bestimmten Winkel mit der Längsachse bildet.
Die Konstanz der Richtung des Geschwindigkeitsvektors im Koordinatensystem des Objekts entspricht der Biomechanik des Gehens: Es ist für eine Person am einfachsten zu gehen, wobei der Zustand "nach vorne gerichtet" beibehalten wird. Bewegungen in ungewöhnliche Richtungen beeinträchtigen im Gegenteil die Sicht des Spielers und erfordern zusätzliche mentale Anstrengungen von ihm.
Punkt 2 stellt die gegenseitige Isolation von Steuerkanälen her, die an den Achsen des SSC "angebracht" sind.
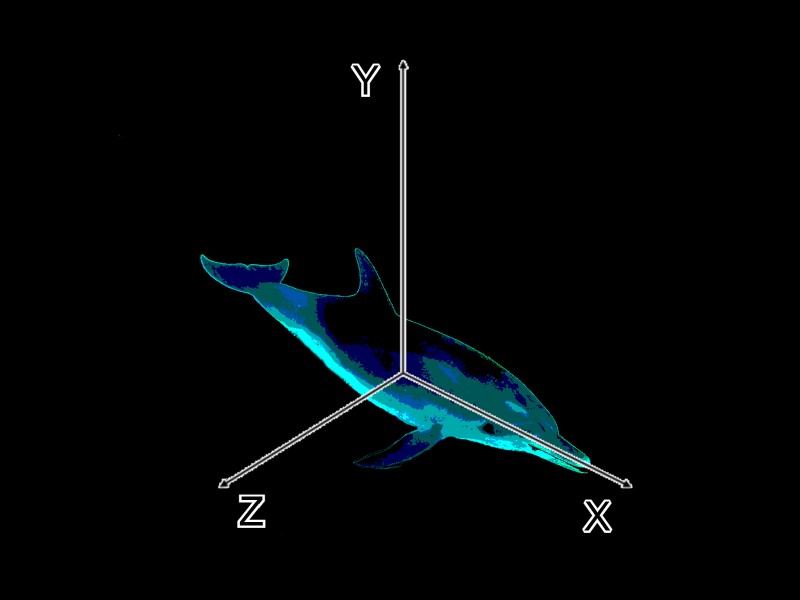
SSC-Achsen: Die Längsachse ( X ) ist vom Schwanz zur Nase des Objekts gerichtet, die Vertikale ( Y ) ist in der Symmetrieebene des Objekts an seiner Ausgangsposition nach oben gerichtet, die Querachse ( Z ) ist senkrecht zu den ersten beiden nach rechts gerichtet. Dementsprechend Drehung um die X- Achse - Seitenkanal, um die Y - Achse - Spurkanal, um die Z - Achse - Längskanal.
Gemäß Abschnitt 2 der angenommenen Vereinfachungen gibt es keine Querverbindungen zwischen den Steuerkanälen des Objekts. Reale Systeme entsprechen immer einem solchen Modell mit einem Fehler, der beispielsweise durch das Vorhandensein gyroskopischer Momente verursacht wird. Das Fehlen von Querverbindungen ist aus Sicht des Spielers von Vorteil.
Punkt 3 stellt fest, dass in jedem Steuerkanal nur zwei Drehmomente vorhanden sind:
- Steuermoment proportional zum Signal von der Steuerung des Spielers;
- Dämpfungsmoment proportional zur aktuellen Winkelgeschwindigkeit.
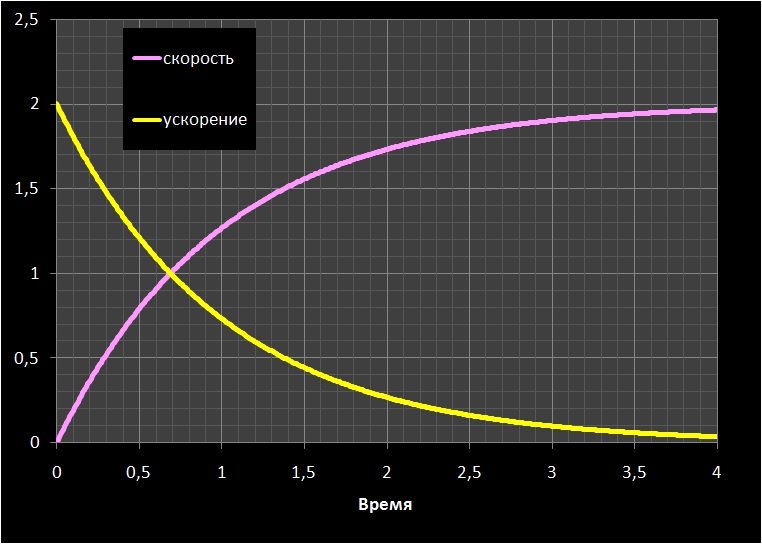
Die Differentialdrehungsgleichung um die i- Achse lautet wie folgt:

Hier ist Omega die Winkelgeschwindigkeit der Drehung, t ist die Zeit, x ist das Steuersignal und die Koeffizienten auf der rechten Seite der Gleichung sind die partiellen Ableitungen der Winkelbeschleunigung aus dem Steuersignal und der Winkelgeschwindigkeit.
Der erste Koeffizient wird als Regelwirkungsgrad bezeichnet , der zweite als Dämpfungskoeffizient .
Die Winkelbeschleunigung wird in [rad / s 2 gemessen ] ist die Winkelgeschwindigkeit in [rad / s]. Das Steuersignal wird normalerweise in Bewegungseinheiten der Hebel oder in ihren Anstrengungen gemessen, seltener in Einheiten der Position der Zwischenelemente des Steuerungssystems. Für die Steuerung über die Tastatur wird dieser Wert jedoch als dimensionslos angesehen. Die Abmessung des Dämpfungsfaktors beträgt [1 / s], und der Regelwirkungsgrad beträgt [rad / s 2 ], wobei die angenommene Abmessung des Steuersignals berücksichtigt wird.
Erforderliche theoretische Informationen
, (1), . , . , :
(1) – x, – . :

(t) – , y(t) – , y – , k – , T – , .
(1) (2) :


( ) , . () – . – .
:

:
:
1. ( ), , .
2. , , .
3. , , , k.
, . k T.
. .
. , : — , — , – . — - , .
, - , . .
, , . .

, . .
( ) k. .
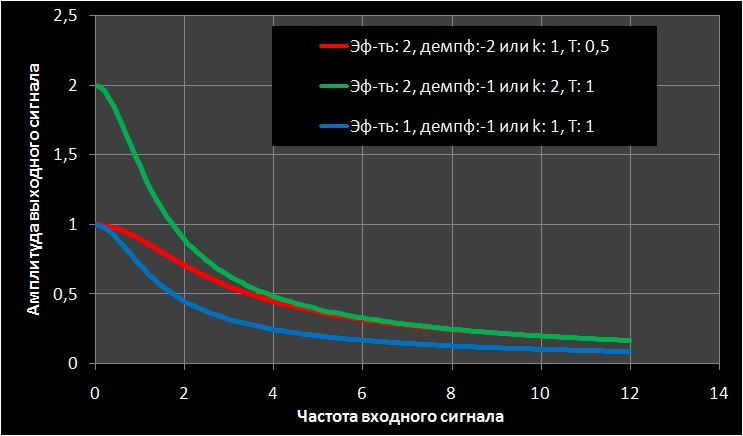
T ( ). T .
( T).

, /2. T.
: ( T) .
- ;
- ();
- ().
(1) – x, – . :
(t) – , y(t) – , y – , k – , T – , .
(1) (2) :
( ) , . () – . – .
:
:
- k ;
- T « », , t = 3T 0,95k.
:
1. ( ), , .
2. , , .
3. , , , k.
, . k T.
. .
. , : — , — , – . — - , .
, - , . .
, , . .
, . .
( ) k. .
T ( ). T .
( T).
, /2. T.
: ( T) .
Versuchsbedingungen und Modellqualitätskriterien
Eine bessere Steuerbarkeit des Objekts sollte eine effizientere Lösung des Problems durch den Spieler bieten. Unterschiedliche Aufgaben erfordern jedoch unterschiedliche Steuerbarkeit: Die genaue Einhaltung der Parameter eines bestimmten Bewegungsmodus unterscheidet sich erheblich von intensiven Manövern.
Das Finden eines universellen Modells für jede Aufgabe ist unweigerlich mit einem Kompromiss verbunden. Die experimentellen Bedingungen bestimmen die subjektive Gleichgewichtsverschiebung zugunsten bestimmter Aufgaben. Es müssen jedoch die spezifischen Bedingungen des Spiels gewählt werden.
Für die Studie verwenden wir das Problem des Besuchs eines kontrollierten Objekts mit der maximalen Anzahl von Orten, die in einer begrenzten Zeit angegeben wurden. Eine effektive Lösung für dieses Problem erfordert intensives Manövrieren.
Das Fahrzeug wird mit Einschränkungen des Roll- und Nickwinkels gesteuert ( 60 Grad in beide Richtungen für beide Winkel): Das Überschreiten der Grenzwerte führt zu einem Unfall. Auch eine Kollision mit einer horizontalen Fläche über dem Objekt führt zu einem Unfall. Dieser Teil der Bedingungen ist für die Komponente der Aufrechterhaltung der Parameter in der Aufgabe des Spielers verantwortlich.
Der Wert des Lineargeschwindigkeitsmoduls des Objekts wird als konstant angenommen. Dies bedeutet, dass die Beschleunigersteuerung sowie die Ungleichmäßigkeit des mittleren Widerstands im Simulator fehlen.
Spielerleistungsindikator - Die Anzahl der Orte, die vor Ablauf der Zeit besucht wurden ( 60)Sekunden) oder vor dem Unfall. Je mehr Standorte besucht werden, desto besser wird das Modell berücksichtigt. Jedes Modell (eine Reihe von Koeffizientenwerten) liefert drei Durchgänge des Spiels, wobei der Medianwert berücksichtigt wird.
Bei der Planung von Experimenten ist es wichtig, den Einfluss des Lernfaktors zu minimieren. Hierzu wurde die Reihenfolge der Experimente festgelegt, in denen jedes Modell im ersten, zweiten und dritten Drittel der Studie gestartet wird:
A, B, C ... N, O,
A, B, C ... N, O,
A, B, C ... N, O. ...
Jedem experimentellen Durchspielen ging ein Übungsspiel mit dem entsprechenden Modell voraus.
Simulator
Sie können sich mit den Modellkoeffizienten experimentieren hier .
Die Gewinnchancenverwaltung befindet sich in der oberen rechten Ecke des Bildschirms. Der Parameter "Wirkungsgrad" ist der Steuereffizienzkoeffizient, der Parameter "Dämpfung" ist der Dämpfungskoeffizient mit dem entgegengesetzten Vorzeichen.
Spielsteuerung:
- Raum - Start des Spiels;
- W / S - Drehung um die SSC Z- Achse , Nase nach unten / Nase nach oben;
- A / D - Drehung um die Y- Achse des SSK, links abbiegen / rechts abbiegen;
- 4/6 auf dem Nummernblock - Drehung um die X- Achse des SSK, nach links rollen / nach rechts rollen.
Der Indikator-Windschutzscheibenspieler sieht den künstlichen Horizont und den aktuellen Kurswert ( «Kurs» ) und die Tiefe ( «Tiefe» ), d. H. Die Entfernung zur gefährlichen Oberfläche. Es zeigt auch den Rest der Spielzeit und das aktuelle Ergebnis ( "Punktzahl" ) - die Anzahl der besuchten Orte.
Der Simulatorcode wird in JavaScript mithilfe der Three.js- Bibliothek geschrieben . Die Werte der Parameter der Bewegung des Objekts werden in der Spielschleife durch numerische Integration von Gleichung (1) unter Verwendung der Euler-Methode aktualisiert. In jeder Iteration wird die update () -Methode des Objekts aufgerufen Fahrzeug , das Berechnungen für jeden Steuerkanal durchführt:
vehicle.update = function () {
// :
game.elapsed = (new Date() - game.time) / 1000;
game.time = new Date();
// ...
// :
vehicle.omegaX += (vehicle.epsilonX - vehicle.omegaX * vehicle.damping) * game.elapsed;
vehicle.omegaY += (vehicle.epsilonY - vehicle.omegaY * vehicle.damping) * game.elapsed;
vehicle.omegaZ += (vehicle.epsilonZ - vehicle.omegaZ * vehicle.damping) * game.elapsed;
// ...
}
Die Felder epsilonX , epsilonY und epsilonZ des Fahrzeugobjekts enthalten die Winkelbeschleunigungskomponenten ohne Dämpfung. Der Wert jedes dieser Felder wird erhalten, indem das Eingangssignal mit dem Steuereffizienzfaktor „multipliziert“ wird:
function init() {
// ...
// :
document.addEventListener('keydown', function (event) {
if (game.state == "READINESS")
if (event.code == "Space") {
// ...
}
if (game.state == "RUN")
switch (event.code) {
case "KeyW":
vehicle.epsilonZ = vehicle.efficiency;
break;
case "KeyS":
vehicle.epsilonZ = -vehicle.efficiency;
break;
case "KeyA":
vehicle.epsilonY = -vehicle.efficiency;
break;
case "KeyD":
vehicle.epsilonY = vehicle.efficiency;
break;
case "Numpad4":
vehicle.epsilonX = vehicle.efficiency;
break;
case "Numpad6":
vehicle.epsilonX = -vehicle.efficiency;
break;
}
});
document.addEventListener('keyup', function (event) {
switch (event.code) {
case "KeyW":
vehicle.epsilonZ = 0;
break;
case "KeyS":
vehicle.epsilonZ = 0;
break;
case "KeyA":
vehicle.epsilonY = 0;
break;
case "KeyD":
vehicle.epsilonY = 0;
break;
case "Numpad4":
vehicle.epsilonX = 0;
break;
case "Numpad6":
vehicle.epsilonX = 0;
break;
}
});
// ...
}
Versuchsergebnisse
Der Qualitätsindikator des Modells wird als Funktion zweier Variablen betrachtet. Dementsprechend stellen die Ergebnisse der Studie grafisch eine 3D- Oberfläche dar, von der jeder Punkt sein eigenes Modell des kontrollierten Objekts definiert.

Betrachten wir die Hauptmerkmale einiger Modelle. In der Tabelle sind die besprochenen Modelle in lateinischen Buchstaben angegeben.
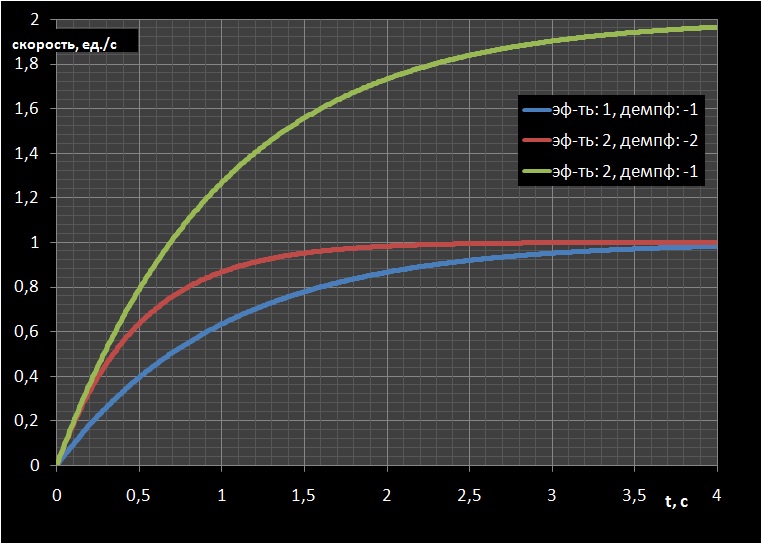
Mit dem Minimalwert des Regelwirkungsgradkoeffizienten ( 0,5 rad / s 2 ) gibt es ein Modell mit dem besten Wert des Dämpfungskoeffizienten (Punkt A ). Modell A zeichnet sich durch eine schwache Fähigkeit des Objekts für dynamische Manöver aus.
Der Wechsel von Modell A zu einer erhöhten Dämpfung führt zur Erstellung von Modellen mit extrem niedrigen Werten für die maximale Winkelgeschwindigkeit. Das Objekt verliert schließlich seine Manövrierfähigkeit.
Das Ändern des Modells A in Richtung abnehmender Dämpfung verbessert teilweise die Manövrierfähigkeit des Objekts, aber die Gesamtqualität des Systems nimmt aufgrund der Verschlechterung seiner dynamischen Eigenschaften ab: Es entsteht ein Aufbauproblem, die Steuerung erfordert ständige Ausgleichsmaßnahmen des Spielers.
Ohne Dämpfung gibt es ein Modell mit optimaler Steuerungseffizienz ( B ). Die Managementeffizienz ist höher als die von Modell A., was eine gute Manövrierfähigkeit bietet. In diesem Fall verschärft sich das Aufbauproblem im Vergleich zu Modell A , das völlig frei von Dämpfung ist.
Durch den Wechsel von Modell B zu einer effizienteren Steuerung wird das Schwungproblem auf ein Niveau gebracht, bei dem dem Spieler die volle Aufmerksamkeit auf den Kampf gewidmet wird. Ferner wird ein Manövrieren ohne Überschreiten der Beschränkungen unmöglich.
Modell C kombiniert die Vorteile der Modelle A und Bed und . Das Objekt wird effizient genug verwaltet, ohne jedoch zu schwingen. Der Wert des Spielleistungsindikators für Modell C.deutlich höher als bei Vorgängermodellen. Dieses Modell ist jedoch nicht das effektivste.
Das Formisolines-Leistungsspiel um Punkt C zeigt, dass die Verbesserung des Ergebnisses dem Bewegungsrichtungsmodell D entspricht .
Diese Bewegung entspricht einer Abnahme des Wertes von T, während k auf einem konstanten Niveau gehalten wird (ungefähr 0,6 rad / s). Modelle zwischen C und D übertreffen C.auf die Effektivität des Spiels. Beim Spielen mit diesen Modellen folgt das Steuerobjekt den Tastenanschlägen genauer.
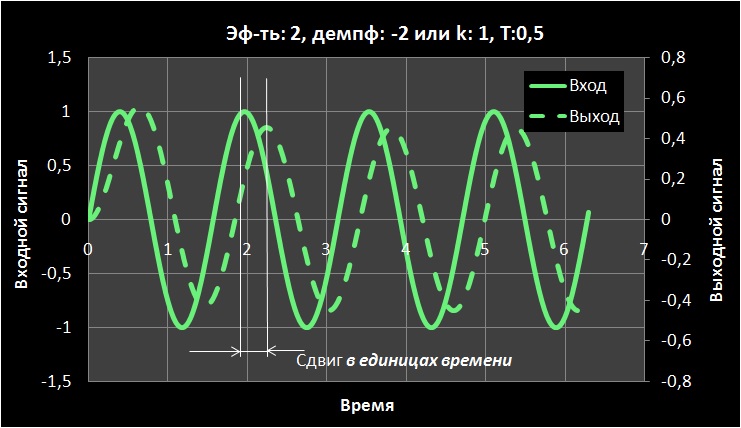
Beim Übergang von Modell C zu Modell D tritt eine weitere Änderung auf: die Verschlechterung des natürlichen Verhaltens des Objekts. Die Zeitkonstante nähert sich dem Pegel, bei dem die Dauer des Übergangs und die Phasenverschiebung des Ausgangssignals für den Benutzer nicht mehr wahrnehmbar sind.
Das Ändern des Modells D in Richtung einer weiteren Abnahme des Wertes von T unter Beibehaltung des Wertes von k führt nicht mehr zu signifikanten Verbesserungen, da die Phasenverschiebung des Ausgangssignals und die Dauer des Übergangsprozesses im Modell D ist bereits klein genug, damit der Spieler es wahrnehmen kann.
Die Modelle, die durch weitere „Verbesserung“ von D aus Sicht des Spielers erhalten wurden, unterscheiden sich nicht von der Implementierung der Verstärkungsverbindung: Es gibt keine Winkelbeschleunigung des Objekts im Spiel, die Winkelgeschwindigkeit nimmt sofort einen konstanten Wert an, wenn die Taste gedrückt wird.
Die durchgeführte Analyse erlaubt es uns, die folgenden Schlussfolgerungen zu ziehen :
1. Die optimalen Werte der Modellparameter entsprechen ihrer Degeneration zu einer verstärkenden Verbindung (der Wert von k beträgt etwa 0,6 rad / s, T = 0 s) und dem Verlust des natürlichen Verhaltens des Objekts.
2. Das Modell, das eine gute Steuerbarkeit mit dem natürlichen Verhalten des Objekts bietet, entspricht Punkt C in der Grafik (Steuerungseffizienzkoeffizient: von 2 bis 3 rad / s 2 ; Dämpfungskoeffizient: von -4,5 bis -3,5 1 / s).
3. Das Ändern des Modells C in Richtung des Verringerns des Wertes von T bei k = const ermöglicht es, ein Objekt mit verbesserter Steuerbarkeit aufgrund der Verschlechterung der Natürlichkeit seines Verhaltens zu erhalten.
Faktoren nicht berücksichtigt
Neben den Vereinfachungen der Physik des kontrollierten Objekts wird die Qualität der Forschungsergebnisse durch andere Vereinfachungen der Forschungsbedingungen beeinflusst:
1. Das Kontrollierbarkeitsmodell wurde durch zwei Werte der Parameter beschrieben, in allen Kontrollkanälen verhielt sich das Objekt gleich. Um ein genaues Bild zu erhalten, sollten die Werte von sechs Parametern variiert werden, da es keinen Grund gibt, die Eigenschaften des Players für alle Kanäle gleich zu betrachten.
2. Die erzielten Ergebnisse sind relevant für die Einstellungen des im Spiel verwendeten Sichtfelds der Kamera. Das Ändern dieses Parameters wirkt sich spürbar auf die Interaktion des Spielers mit dem Objekt aus.
Der schwerwiegendste Fehler in der Studie ist das Fehlen von Statistiken. Jede ergonomische Forschung sollte sich auf die Eigenschaften der gesamten Zielgruppe konzentrieren. Vollständigere Ergebnisse können mit der Teilnahme einer Gruppe von Spielern erzielt werden.