
Vor einigen Jahren haben Wissenschaftler der Ben-Gurion-Universität einen kompakten Roboter entwickelt - Rising STAR (RSTAR). Jetzt hat er einen Partner mit einem ähnlichen Design - Big STAR (BSTAR), aber der neue Roboter ist sechsmal größer. Das Tandem soll die Produktivität steigern, die Vielseitigkeit von Robotern verbessern und sie weniger anfällig machen. RSTAR und BSTAR werden bei Such- und Rettungsaktionen eingesetzt, wenn im Gelände und in unebenem Gelände Bewegung erforderlich ist.
Die STAR-Roboter wurden von dem Wissenschaftler David Zarrouk und Kollegen der Ben-Gurion-Universität entwickelt. Bei seinen ersten Entwürfen achtete Zarruk auf die Autonomie der Strukturen. Die ersten STAR-Versionen erwiesen sich als sehr autonom und wendig. Roboter lassen sich je nach Umgebungsbedingungen leicht umbauen. RSTAR hat also Rotoren - es kann um Hindernisse herumfliegen. Zusätzlich verfügt der Roboter über aufblasbare Schwimmbecken. Da das Design erfolgreich war, beschloss das Entwicklungsteam, noch weiter zu gehen. Infolgedessen hat RSTAR einen älteren Bruder - BSTAR.
BIG STAR-Funktionen
Der BSTAR-Roboter weist die folgenden Eigenschaften auf:
- Strukturbewegungsgeschwindigkeit bis zu 1,4 m / s;
- Roboternutzlast> 5 kg;
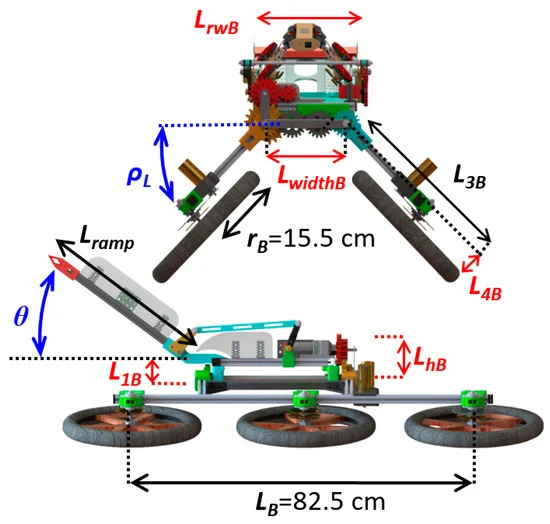
- Länge der Struktur von der Hinterradachse zur Vorderradachse - 82,5 cm;
- einziehbarer "Schwanz" zum Tragen von RSTAR;
- Gleitstruktur;
- minimale gefaltete Höhe - 21 cm;
- 2 Lithium-Polymer-Batterien mit einer Kapazität von 5200 mAh;
- Gewicht - 9,8 kg.
Der Roboter kann sich über unwegsames Gelände bewegen. Die Synergie zwischen BSTAR und RSTAR wird voraussichtlich die Navigations- und Hindernisfreigabefähigkeiten verbessern. Darüber hinaus kann ein großer Roboter als Ladegerät für einen winzigen RSTAR dienen.
Roboter eignet sich für den Transport einer großen Nutzlast: Batterien, Kameras, Kommunikationsgeräte und andere Sensoren für Such- und Rettungsaktionen.
Der Roboter wird von einem Arduino Uno-Controller und zwei RobotClaw ECS-Controllern gesteuert.
Der erste israelische Star

multifunktionale Quellroboter RSTAR erschien 2018. Aufgrund adaptiver Designänderungen kann es sich auf horizontalen und vertikalen Oberflächen bewegen sowie auf Rädern kriechen oder fahren. Der Roboter passt sich schnell den äußeren Bedingungen an: Er kann den Winkel zwischen den Radrahmen ändern und sie parallel zur Karosserie hin und her bewegen.
Zusätzlich kann RSTAR den Schwerpunkt ändern. Er kann über ein Hindernis fahren, das zu hoch für ihn ist, und dann das Zentrum bewegen und es sicher überwinden.
Aufgrund der Tatsache, dass der Roboter über einen Verlängerungsmechanismus mit vier Stangen verfügt, kann er den Abstand zwischen Körper und Beinen vergrößern und sich zwischen Wänden bewegen.
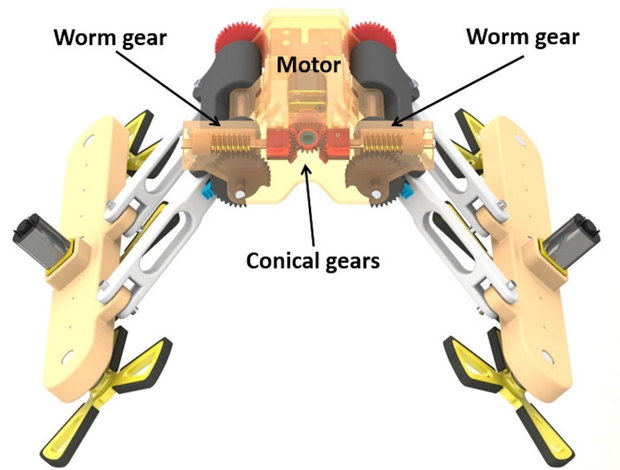
Um die Mobilität zu erhöhen, kann der Roboter mit Rädern oder Speichenstützen ausgestattet werden. Er kann kopfüber laufen und mit Hilfe des Schneckengangs über Hindernisse kriechen, die größer sind als der Durchmesser seiner Räder.
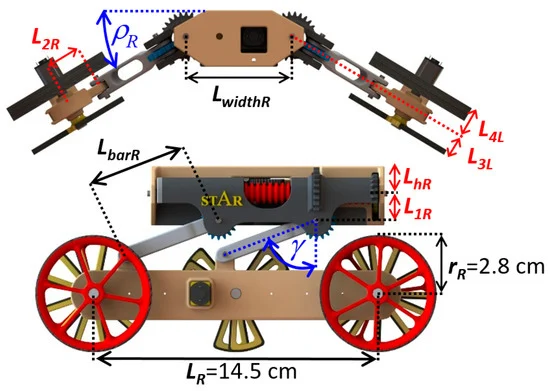
Der Roboter ist mit einer 800-mAh-LiPO-Batterie ausgestattet, es ist jedoch geplant, ihn autonomer zu gestalten. Die Mindesthöhe des wendigen Roboters beträgt 3,5 cm, sodass er in sehr engen und schwer erreichbaren Stellen navigieren kann. Die Höchstgeschwindigkeit des Roboters beträgt bis zu 0,8 m / s. Die Masse der Struktur beträgt 0,38 kg.
Vereinigung von zwei Sternen
Einerseits haben BSTAR und RSTAR ähnliche Designs, die nur im Maßstab 6 bis 1 hergestellt wurden. Aufgrund der Größe des BSTAR mussten jedoch einige seiner Teile ersetzt werden .
BSTAR verwendet einen Metallrahmen, während RSTAR einen Kunststoffrahmen verwendet.
Ein wichtiges neues Designelement des Roboters ist sein einziehbares "Heck" - eine bewegliche Plattform im Heck. Die Plattform kann den Neigungswinkel in negativer und positiver Richtung ändern. Der Hauptzweck des "Schwanzes" ist es, den winzigen RSTAR zu tragen. Insgesamt 3 "Roboterkinder" können auf die übergeordnete Site passen.
Die Site kann in verschiedenen Fällen für zusätzliche Manöver verwendet werden. Beispielsweise kann RSTAR beim Betreten des BSTAR-Standorts Hindernisse aus großer Höhe untersuchen.
Wie oben erwähnt, wird das Baby aus der Batterie seines „Verwandten“ aufgeladen.
Wie geplant sollte die Zusammenarbeit zweier multifunktionaler Roboter ihre Produktivität und Vielseitigkeit erheblich steigern, die Geschwindigkeit der Geländeerkundung erhöhen und den Bereich möglicher Operationen erweitern.
