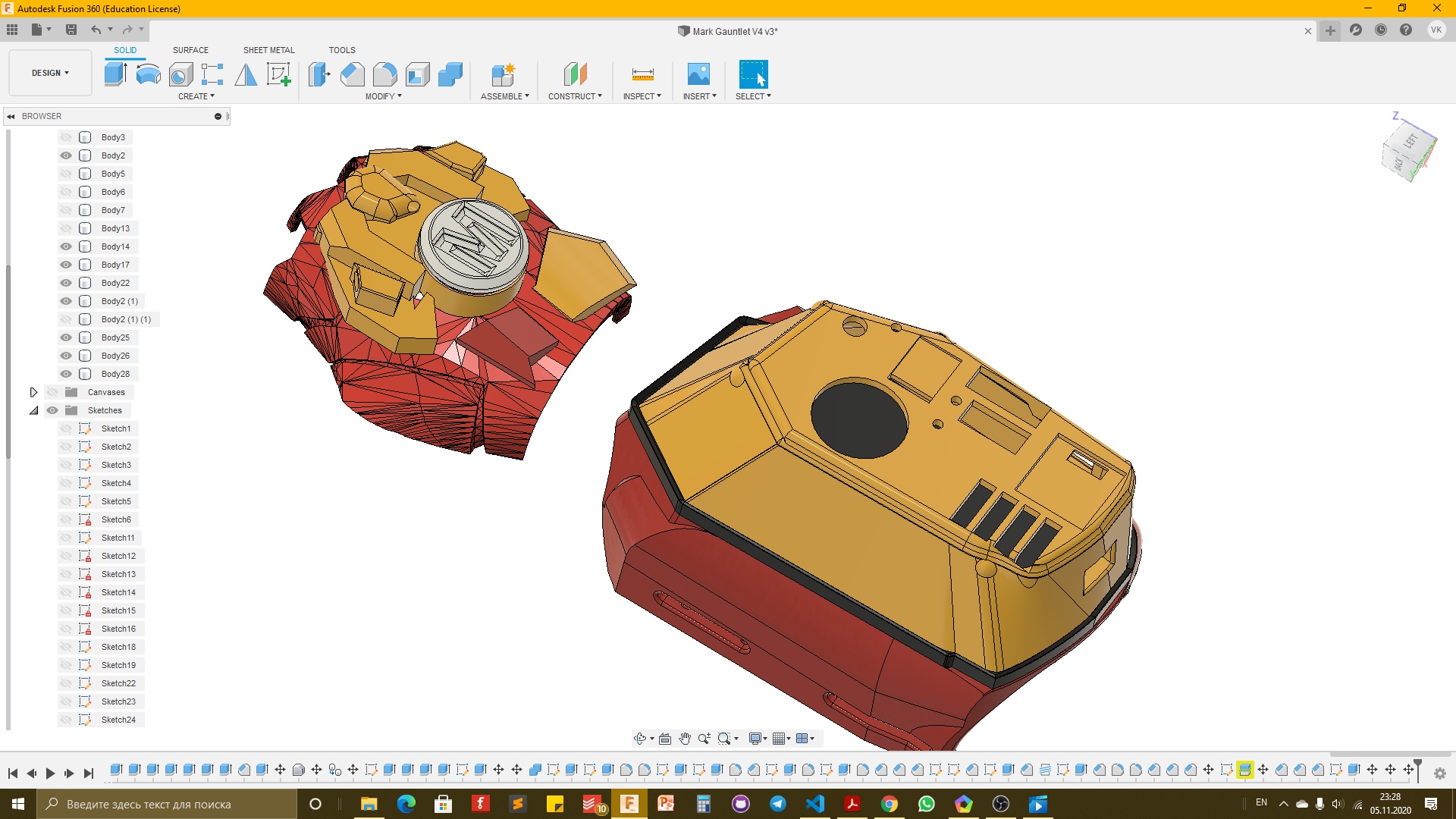
In diesem Artikel werde ich versuchen, die Essenz meines Projekts zu skizzieren und den Prozess zu zeigen, der von einer Skizze eines Roboterhundes bis zur Bestellung von Leiterplatten für einen Handschuh verlief
Start
Der Handschuh stammt direkt aus meinem Mark-Projekt und ist auch ein wichtiger Teil davon. Sie sollten also damit beginnen.
Der allererste Prototyp des Roboters wurde eines Abends im Sommer 2018 hergestellt. Es war ein vierbeiniger Roboter, bestehend aus 8 SG90-Servos (normales Blau) und Nagelstücken. All dies war mit Heißschmelzkleber verbunden und hatte aufgrund der sehr schlechten Massenverteilung keine einzige Chance für den normalen Betrieb. Aber ich wusste das nicht, und an diesem Abend zwang ich ihn, in einer geraden Linie zu gehen, und weitere 15 Minuten später begann das Brett, durch das die Energie geliefert wurde, zu rauchen und ein versiegelter linearer Stabilisator erschien auf dem Tisch (übrigens verstand ich nicht, was dort geschah). ...
Ich konnte diesen Haufen heißer Klebenägel und Klebeband nicht reparieren. Zu meiner Verteidigung kann ich sagen, dass ich in diesem Moment nicht wusste, wie man lötet. Aus der Elektronik habe ich nur verstanden, dass es unmöglich war, + und - zu schließen, aber ich hatte nichts von der Existenz des 3D-Drucks gehört.
Ende des Sommers bestellte ich meinen ersten Drucker - Anet A8.
Gewöhnlicher Drucker, um sich mit der Technologie vertraut zu machen: ein Acrylrahmen, Kinematik mit einer "Trockenbauwand" und laute Motoren (eher deren Treiber)
Fast unmittelbar nach dem Kauf beherrschte ich Tinkercad, wo ich diesen vierbeinigen Roboter nachbildete, indem ich Nägel durch Plastik ersetzte und ein rotierendes Servo hinzufügte.
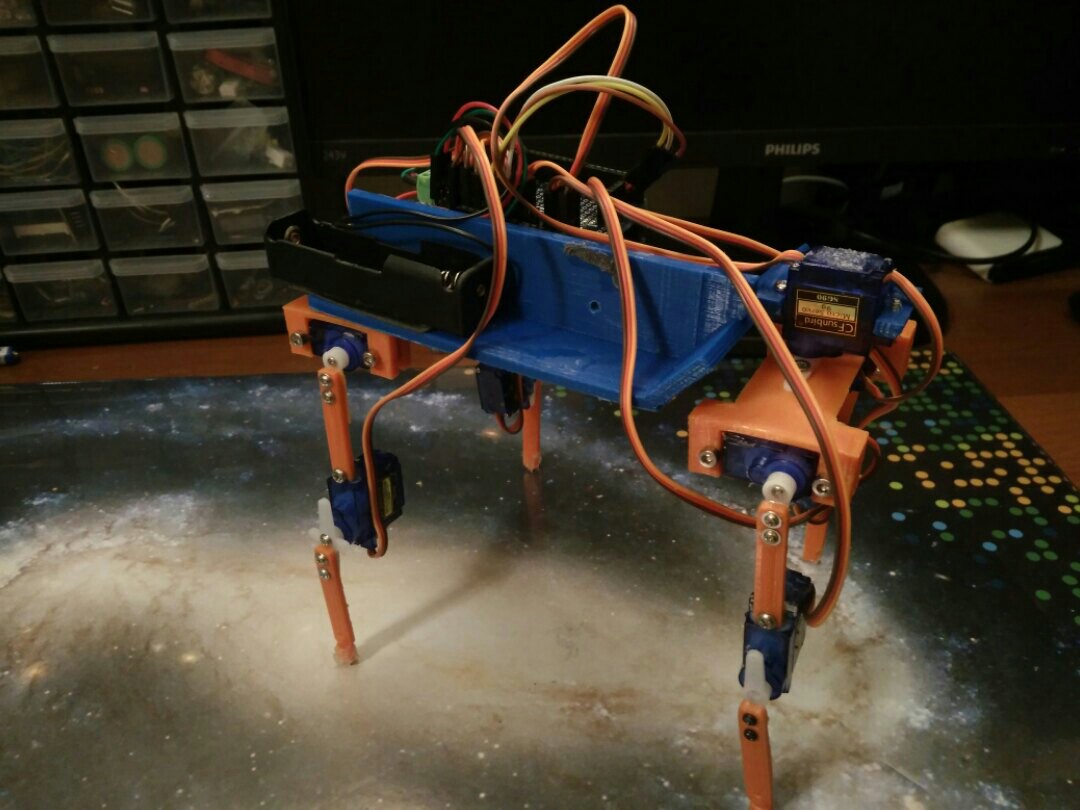
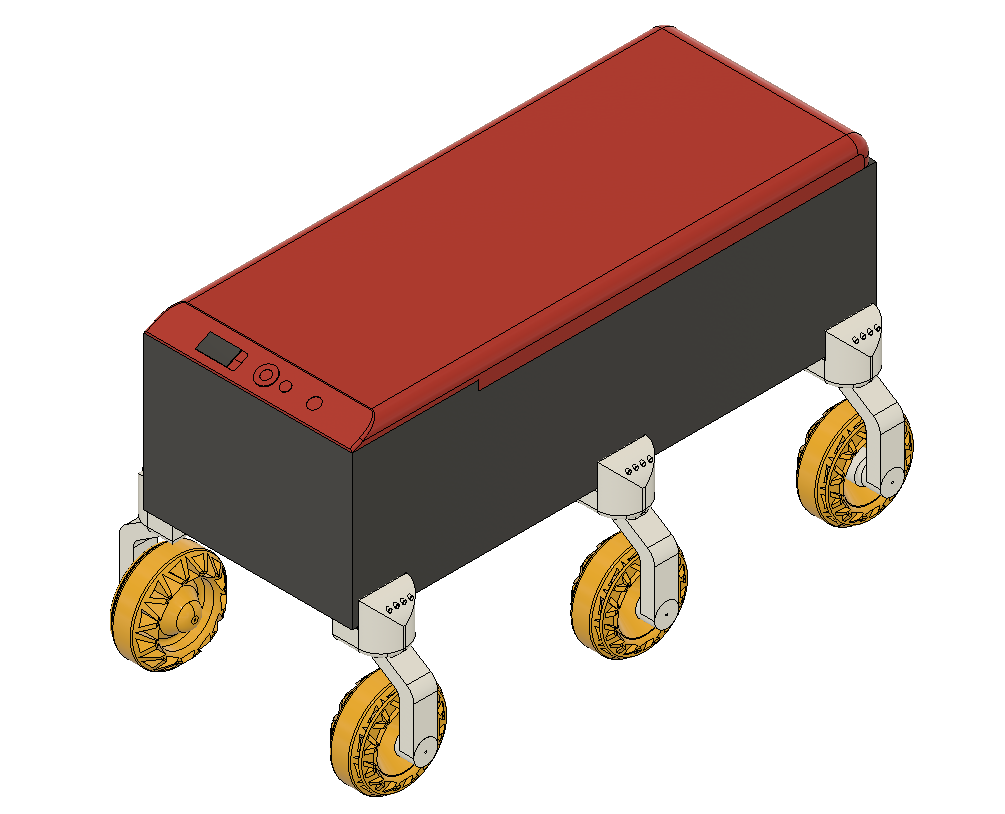
Diese Kreation kam nie, aber sie ermutigte mich, andere Versionen zu erstellen. Vielleicht mache ich einen separaten Artikel für meine Wurmfußroboter, also gebe ich Ihnen nur eine Folge von Fotos der Versionen.
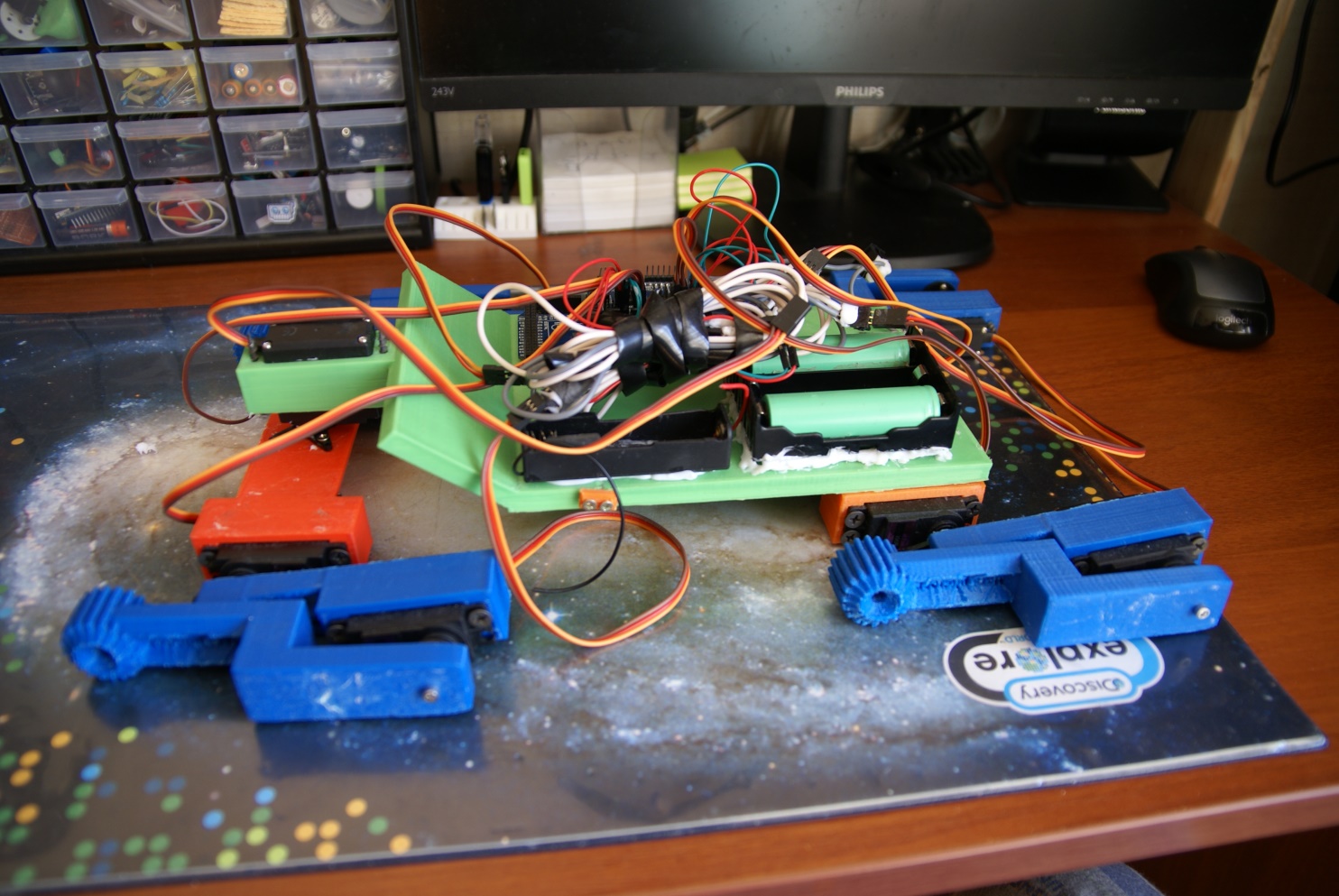

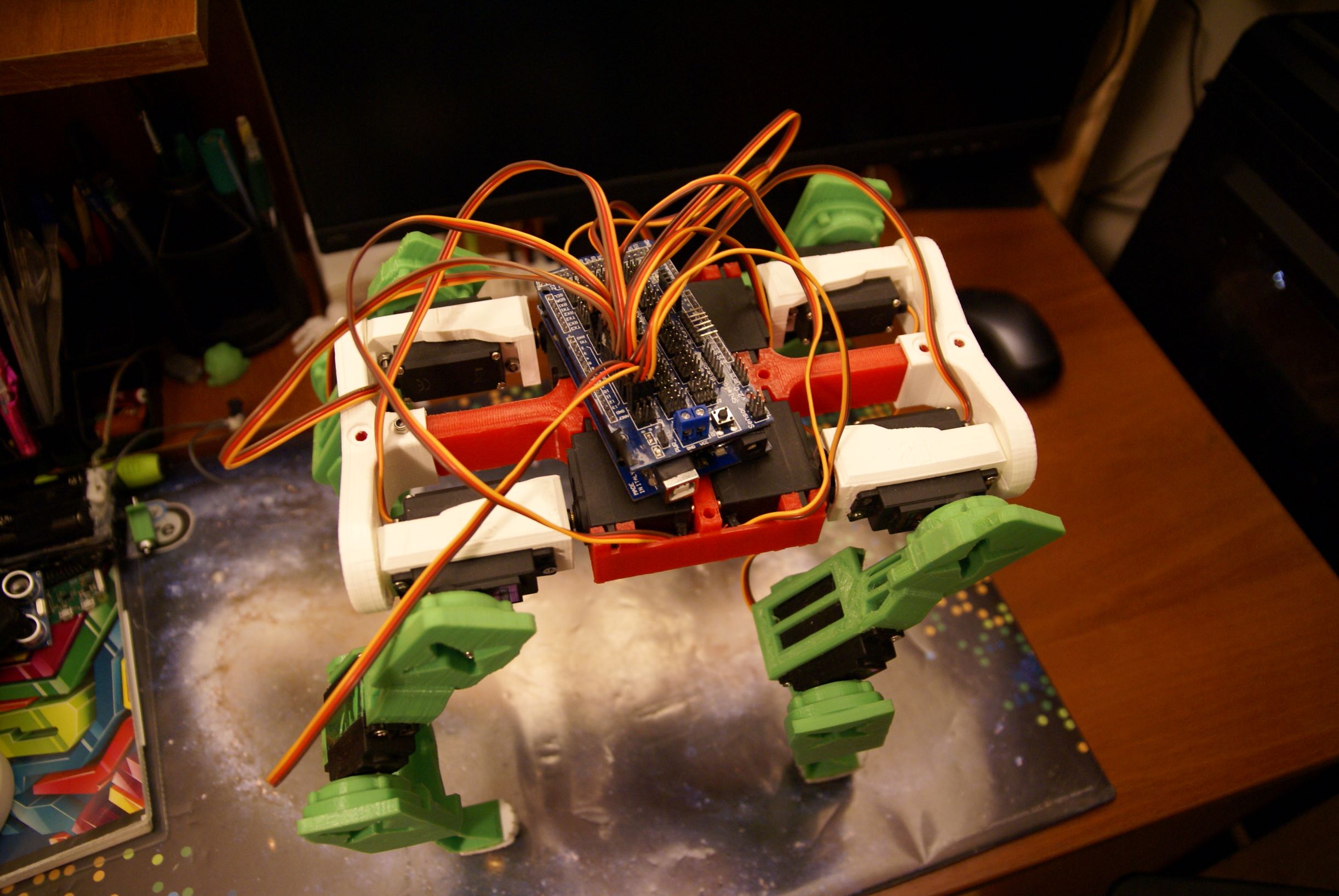
Die neueste Version erwirbt jetzt einen Körper, der jedoch normal lief und eine gute Tragfähigkeit aufweist.
2 Mark. , . - , .
:
Mark - , - .
Mark 6 - , .
Mark 3 - , , 4 .
Mark 4 - , .
Mark 5 - 6 . .
Mark 7 - , Mark 5 .
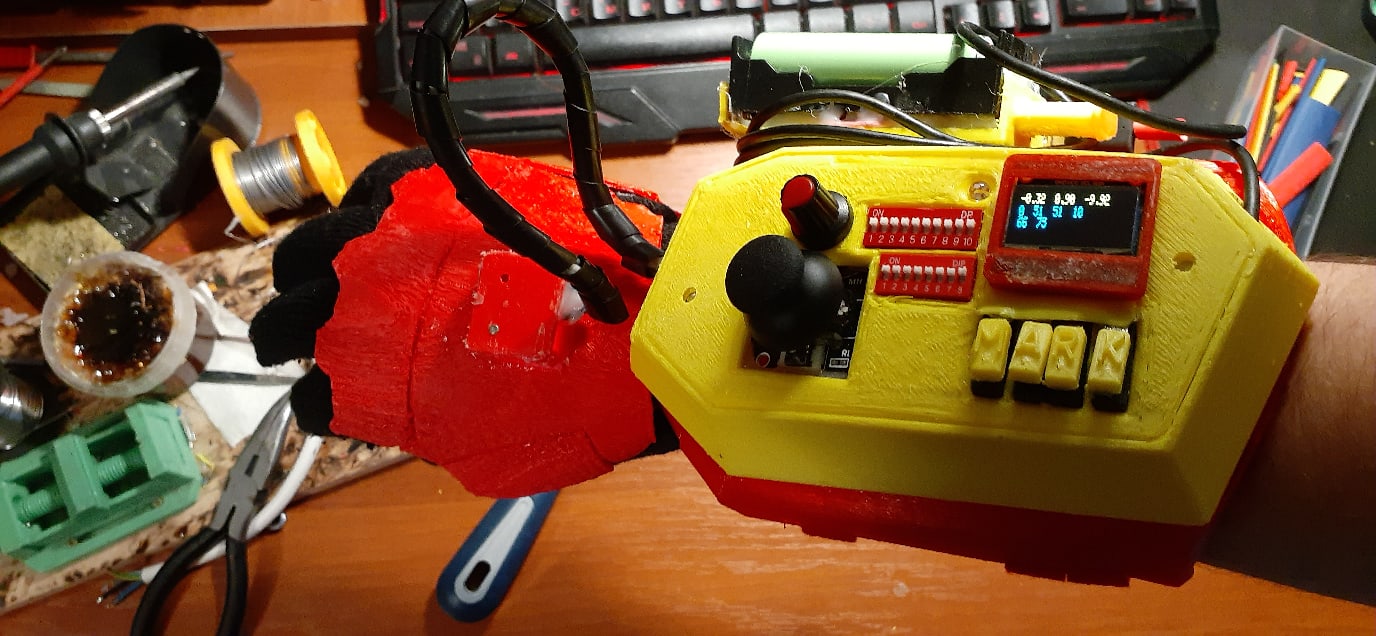
Mark gauntlet – .
Mark 6, Mark 4, Mark 3 Mark gauntlet.
Mark 6 ,
: 1
2020 , : 433 . ( , ) https://youtu.be/eEAHhr9Suug?t=194

: 2
2 , .

nrf24l01, . https://youtu.be/P_fq7KkfJrI
Rukami. 2-3 , .
: 3 4
.
3 :
:
WiFi esp8266
NRF24l01+
433
Bluetooth
+
OLED
, - . https://youtu.be/52WvejA6dyk .
4 :
Atmega2560
:
:
WiFi
NRF24L01+
LoRa
MP3
- ( )
+
+
OLED
, 4.2
4.2
, ,
-
4
3 18650 3.4 * , . .
2 ,

, . LoRa . : https://github.com/Madjogger1202/Mark_GauntletV4.2/blob/main/src/main.cpp
.
/*
Hi stranger, this is main code file for this project
I'm not a 100% programmer, but i can make electronics work,
so i will be grateful if you add any features
it is fully opensource project, so anyone can build stuff based on this code
have a great time reading this badly written working code (^_^)
*/
#include <Arduino.h> // why not...
#include <Wire.h>
#include <SPI.h>
// i have to make all modules work, so i will use some libraris to make life easier
//1) Display. im using 0.96 oled from china, it is not standart at dimentions, bt i like how it looks in final designs :)
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h> // Adafruit librari works 50/50, it depends on display driver (yes, they can hava same names, bt diffrent drivers)
//2) RGB Led panel. LEDs 2812 (8-bit panel)
#include <microLED.h>
//3) NRF24L01+
#include <nRF24L01.h>
#include <RF24.h>
//4)APDC9960 usefull sensor
#include "Adafruit_APDS9960.h"
//5) LoRa radio sx1278
#include <RH_RF95.h>
//6) MPU6050 gyro + acsel
#include <Adafruit_Sensor.h>
#include <Adafruit_MPU6050.h>
//7) MP3 module
#include <DFPlayer_Mini_Mp3.h>
// first switches connection
int8_t first_sw[8] = { A14, A13, A12, A11, A10, A9, A8, A7 };
// second switches connection
int8_t second_sw[8] = { 38, 37, 36, 35, 34, A6, 32, A15 };
// buttons connection
int8_t buttons[4] = { A3, A1, A0, A2 };
#define LED1 10
#define LED2 11
#define JOY_X A6
#define JOY_Y A5
#define POT A4
#define LORA_D0 42
#define LORA_NSS 43
#define LORA_RST 44
#define NRF_CSN 40
#define NRF_CE 41
#define IR_LED 7
#define R_LED 4
#define G_LED 5
#define B_LED 6
#define WS_LED 45
LEDdata leds[8];
microLED strip(leds, 8, WS_LED);
#define ORDER_GRB
RF24 radio(NRF_CE, NRF_CSN);
Adafruit_MPU6050 mpu;
Adafruit_SSD1306 display(128, 32, &Wire, -1);
Adafruit_APDS9960 apds;
volatile bool irqMPU;
volatile bool irqAPDC;
struct allData
{
volatile boolean irqMPU;
volatile boolean irqAPDC;
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
uint8_t led1Mode;
uint8_t led2Mode;
uint8_t redLedMode;
uint8_t blueLedMode;
uint8_t greenLedMode;
uint8_t wsLedMode;
}mainData;
struct radioData
{
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
} telemetriData;
void readMode();
void readCh();
void readAcs();
void readJoy();
void readPot();
void readButtons();
void sendNRF();
void sendBL();
void sendLoRa(); // will reliase it soon
void displayInfo();
// at all it is possible to create up to 256 diffrent modes,
// but if you need more - connect mode counter with channel counter (maybe partly)
void n1Mode();
void n2Mode();
void n3Mode();
void n4Mode();
void n5Mode();
void n6Mode();
void n7Mode();
void n8Mode();
void n9Mode();
void n10Mode();
void n11Mode();
void n12Mode();
void acsel()
{
mainData.irqMPU=true;
}
void gesture()
{
mainData.irqAPDC=true;
}
void setup()
{
for(int i=0;i<8;i++)
pinMode(first_sw[i], INPUT_PULLUP);
for(int i=0;i<8;i++)
pinMode(second_sw[i], INPUT_PULLUP);
for(int i=0;i<4;i++)
pinMode(buttons[i], INPUT_PULLUP);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
analogWrite(LED1, 10);
analogWrite(LED2, 100);
pinMode(JOY_X, INPUT);
pinMode(JOY_Y, INPUT);
pinMode(POT, INPUT_PULLUP);
pinMode(LORA_D0, OUTPUT);
pinMode(LORA_NSS, OUTPUT);
pinMode(LORA_RST, OUTPUT);
pinMode(NRF_CSN, OUTPUT);
pinMode(NRF_CE, OUTPUT);
pinMode(IR_LED, OUTPUT);
pinMode(R_LED, OUTPUT);
pinMode(G_LED, OUTPUT);
pinMode(B_LED, OUTPUT);
pinMode(WS_LED, OUTPUT);
strip.setBrightness(130);
strip.clear();
strip.show();
strip.fill(mCOLOR(YELLOW));
strip.show();
Serial.begin(115200);
Serial2.begin(9600);
mp3_set_serial(Serial2);
mp3_set_volume(30);
mp3_play (1);
if (!mpu.begin())
Serial.println("Sensor init failed");
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32
Serial.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
display.display();
display.clearDisplay();
display.display();
if(!apds.begin())
Serial.println("failed to initialize device! Please check your wiring.");
apds.enableProximity(true);
apds.enableGesture(true);
radio.begin();
radio.setChannel(100);
radio.setDataRate (RF24_1MBPS);
radio.setPALevel (RF24_PA_HIGH);
radio.openWritingPipe (0x1234567899LL);
radio.setAutoAck(false);
attachInterrupt(0, acsel, RISING);
attachInterrupt(1, gesture, RISING);
Serial1.begin(9600); // bluetooth module connected to Serial1
delay(5000);
mp3_stop ();
}
void loop()
{
readMode();
readCh();
readAcs();
readJoy();
readPot();
readButtons();
Serial.println(digitalRead(A14));
Serial.println(digitalRead(A13));
Serial.println(digitalRead(A12));
Serial.println(digitalRead(A11));
Serial.println(digitalRead(A10));
Serial.println(digitalRead(A9));
Serial.println(digitalRead(A8));
Serial.println(digitalRead(A7));
Serial.println();
Serial.println();
displayInfo();
switch (mainData.mode)
{
case 0:
n1Mode();
break;
case 2:
n2Mode();
break;
case 3:
n3Mode();
break;
case 4:
n4Mode();
break;
}
}
void readAcs() // reading acseleration values from sensor directly to main struct
{
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
mainData.x_acs = a.acceleration.x;
mainData.y_acs = a.acceleration.y;
mainData.z_acs = a.acceleration.z;
return;
}
void readJoy() // i am filering analog values for better perfomance
{
mainData.joyX = (analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X))/4;
mainData.joyY = (analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y))/4;
return;
}
void readPot()
{
mainData.potData = analogRead(POT);
return;
}
void readButtons() // buttons : 1) 1; 2)0; 3)1; 4)1; and mainData.button == 1011
{
mainData.button = !digitalRead(A1)*1000+!digitalRead(A2)*100+!digitalRead(A3)*10+!digitalRead(A0);
return;
}
void sendNRF()
{
// i am writing telemetri struct only when sending data
// in this case i can track how relevant telemetri data is
telemetriData.stable = mainData.stable;
telemetriData.x_acs = mainData.x_acs;
telemetriData.y_acs = mainData.y_acs;
telemetriData.z_acs = mainData.z_acs;
telemetriData.mode = mainData.mode;
telemetriData.channel = mainData.channel;
telemetriData.button = mainData.button;
telemetriData.potData = mainData.potData;
telemetriData.joyX = mainData.joyX;
telemetriData.joyY = mainData.joyY;
radio.write(&telemetriData, sizeof(telemetriData));
}
void sendBL(String inp)
{
Serial1.print(inp);
return;
}
// void sendLoRa();
void displayInfo()
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0, 0);
display.print(mainData.channel);
display.print(" ");
display.print(mainData.mode);
display.print(" ");
display.println(mainData.z_acs);
display.print(mainData.button);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.println(mainData.potData);
display.display();
}
void readMode()
{
bitWrite(mainData.mode, 0, (!digitalRead(A14)));
bitWrite(mainData.mode, 1, (!digitalRead(A13)));
bitWrite(mainData.mode, 2, (!digitalRead(A12)));
bitWrite(mainData.mode, 3, (!digitalRead(A11)));
bitWrite(mainData.mode, 4, (!digitalRead(A10)));
bitWrite(mainData.mode, 5, (!digitalRead(A9)));
bitWrite(mainData.mode, 6, (!digitalRead(A8)));
bitWrite(mainData.mode, 7, (!digitalRead(A7)));
return;
}
void readCh()
{
bitWrite(mainData.channel, 0, digitalRead(second_sw[0]));
bitWrite(mainData.channel, 1, digitalRead(second_sw[1]));
bitWrite(mainData.channel, 2, digitalRead(second_sw[2]));
bitWrite(mainData.channel, 3, digitalRead(second_sw[3]));
bitWrite(mainData.channel, 4, digitalRead(second_sw[4]));
bitWrite(mainData.channel, 5, digitalRead(second_sw[5]));
bitWrite(mainData.channel, 6, digitalRead(second_sw[6]));
bitWrite(mainData.channel, 7, digitalRead(second_sw[7]));
return;
}
void n1Mode()
{
sendNRF();
digitalWrite(LED1, !digitalRead(LED1)); // just blink to understand, that it is working
}
void n2Mode()
{
}
void n3Mode()
{
}
void n4Mode()
{
}
void n5Mode()
{
}
void n6Mode()
{
}
void n7Mode()
{
}
void n8Mode()
{
}
void n9Mode()
{
}
void n10Mode()
{
}
void n11Mode()
{
}
void n12Mode()
{
}