Vor etwas mehr als einem Jahr hatte ich das Glück, Teil des Teams von Wissenschaftlern und Ingenieuren zu werden, die für den Betrieb des Curiosity Rovers verantwortlich sind. Seitdem habe ich viel über Rover gelernt. Aber es bleibt noch viel zu sehen. Geist, Gelegenheit, Neugier und Ausdauer sind einige der fortschrittlichsten und zuverlässigsten Roboter, die jemals vom Menschen geschaffen wurden. Gleichzeitig sind die Werkzeuge und Methoden zur Steuerung von Rovers recht einfach zu erlernen und verständlich. Und das ist gut so, denn am 18. Februar wird Perservance auf die Marsoberfläche hinabsteigen und danach geschickt, um den Planeten zu studieren. Jetzt ist meine Aufgabe, Ihnen zu sagen, wie Sie den Rover steuern können. Wenn der neue Rover auf dem Mars ankommt, werden Sie bereits verstehen, was passiert und wie alles funktioniert.
Ein Großteil dieses Artikels ist eine Zusammenfassung meiner Erfahrungen mit Curiosity. Denken Sie daran, dass Geist und Gelegenheit in vielerlei Hinsicht ihrem "Erben" in dieser Hinsicht ähnlich sind. Für die Verwaltung von Perservance werden dieselben Technologien und Methoden verwendet, sodass keine wesentlichen Unterschiede bestehen.
Die Grundlagen
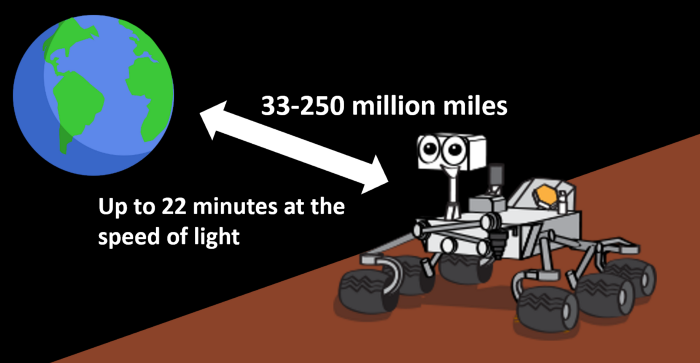
Die Hauptsache ist, dass der Mars sehr, sehr weit von uns entfernt ist. Ein von der Erde gesendetes Funksignal erreicht in 22 Minuten die Marsoberfläche. Daher ist eine Echtzeitsteuerung keine Option. Darüber hinaus erhält Curiosity einmal täglich Informationen von der Erde. Den Rest der Zeit ist er alleine. Gleichzeitig sprechen wir nicht von Autonomie: Der Rover verfügt über eine begrenzte Anzahl von Aktionen, die er unabhängig ausführen kann. Das meiste, was der Rover tut, wird geplant und in den Speicher des Geräts auf der Erde geschrieben.
Natürlich gibt es einige Ausnahmen: Der Rover muss in der Lage sein, einige Probleme selbst zu lösen. Aber die meisten dieser Entscheidungen halten an und warten auf Anweisungen von der Erde als Reaktion auf einen externen Faktor. Aegis hat ein gewisses Maß an Autonomie - ein System, das unabhängig ein Stück Fels auswählen kann, in das Curiosity mit einem Laser "schießen" soll.
Pass auf wo du hintrittst
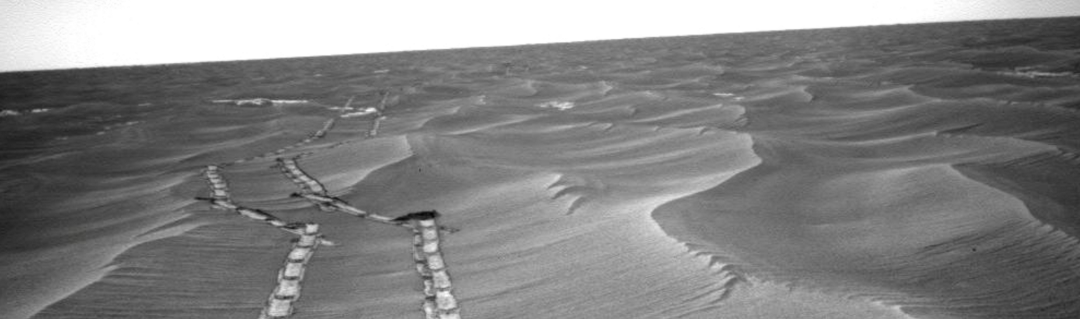
Die Hauptaufgabe des Rover-Betreibers ist es, seine Sicherheit während der gesamten Reise auf dem Mars zu gewährleisten. Daher müssen Sie alle möglichen Optionen für Ihre Aktionen sorgfältig prüfen. Die Rover der NASA haben mehrere Kameras, dank derer der Rover ein "Bild" bildet, als ob er mit menschlichen Augen gesehen würde. Es gibt auch Hazcams, „Hazard-Kameras“, die Probleme in der Nähe bewerten, und Navcams, Navigationskameras, die die bevorstehende Straße bewerten. Es gibt auch andere Kameras, die jedoch hauptsächlich für wissenschaftliche Aufgaben verwendet werden. Ich werde daher nicht beschreiben, wie sie funktionieren.

In den meisten Fällen werden Navcams verwendet, um den Rover-Streckenabschnitt visuell zu beurteilen. Die Bilder, die sie erhalten, können als dreidimensionales "Bild" auf der Erde betrachtet werden. Die NASA hat eine spezielle Software entwickelt, mit der die Umgebung des Rovers visualisiert und ein virtuelles Modell des Rovers und der Umgebung erstellt werden kann. Dieses virtuelle Modell wird verwendet, um vom Bediener geplante Aktionen zu testen. Wenn die Emulation gut gelaufen ist, können die Befehle an den Mars gesendet werden. Auf diese Weise ersparen sich Wissenschaftler die möglichen negativen Folgen der Entsendung eines nicht verifizierten Teams.
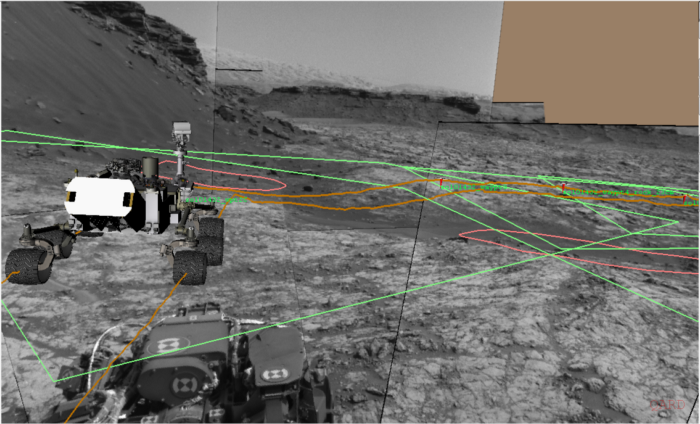
So sieht die simulierte Roverbewegung aus, nachdem das Modell vollständig fertig ist. Die Grauzonen sind der Abschnitt des Mars, durch den der Rover in naher Zukunft fahren wird. Die orange-braunen Linien sind in der Tat der Weg des Rovers. Pro Tag werden etwa 30 Meter der Oberfläche modelliert. Die Kameras können einfach keine weiteren Informationen erfassen, sodass der Rover so viel fährt.
Und hier ist die Überlagerung der simulierten Rover-Spur mit den realen Bildern, die von Navigationskameras erhalten wurden.
Bei der Planung der Bewegung des Rovers sind mehrere wichtige Punkte zu beachten. Zum Beispiel die Größe von Objekten auf dem Weg. Die maximale Größe des Rovers beträgt ca. 50 cm. Alles, was größer ist, muss abgerundet werden. Sand (es ist nicht gerade Sand, aber nennen wir es so) ist auch wünschenswert, um sich zu bücken: Wenn es viel davon gibt, kann der Rover stecken bleiben. Selbst kleine Felsbrocken sind gefährlich, da ihre scharfen Kanten die Roverräder beschädigen.
Schnell, langsam oder langsam?
Nachdem Wissenschaftler die Bewegungsrichtung festgelegt haben, müssen Sie genau verstehen, wie Sie sich bewegen. Es gibt drei Modi: Blindmodus, visuelle Kilometerzähler und Autonav.
Der Blindmodus ist die einfachste mögliche Bewegung. In diesem Fall folgt der Rover den Anweisungen der Erde und achtet auf nichts. Idealerweise ist dies eine großartige Möglichkeit, einen Rover zu fliegen, aber die Bedingungen auf dem Mars sind alles andere als ideal. Oft beeinflussen externe Faktoren den Fortschritt auf dem Weg zum Ziel. Dies können zum Beispiel Gleiträder auf der Oberfläche sein, so dass der Rover statt 10 Meter 9 oder sogar 5 bewegt.
Ein guter Weg, um zu verstehen, was Blindlenkung ist, besteht darin, die Augen zu schließen und zu versuchen, einem bestimmten Weg zu folgen. Zum Beispiel 7 Meter vorwärts, dann 30 Grad nach links drehen und weitere 4 Meter gehen. In diesem Fall haben wir keine Ahnung, was um uns herum passiert, und wir passen uns nicht an sich ändernde Bedingungen an.
Im Allgemeinen ist eine blinde Lenkung nicht die beste Option, aber sie ermöglicht es dem Rover, sich schnell zu bewegen, da das System nicht anhalten muss, um Bilder aufzunehmen. Bei maximaler Geschwindigkeit kann der Rover in nur einer Stunde die Länge eines Fußballfeldes zurücklegen. Diese Option wird jedoch nur gewählt, wenn sich keine potenziell gefährlichen Objekte in der Nähe befinden.
Visuelle Kilometerzählervon Betreibern häufiger verwendet. In diesem Fall hält der Rover jeden Meter an, um mit Kameras ein Bild vom Boden zu machen. Der Bordcomputer wertet dann das Bild aus, vergleicht es mit dem vorherigen und versucht herauszufinden, was sich um ihn herum geändert hat, einschließlich des Standorts des Rovers. Der Computer sendet dann neue Navigationsbefehle, um Sie auf dem Laufenden zu halten.
Diese Methode ähnelt der vorherigen, nur dass Sie alle paar Schritte verschieben müssen, um die Augen zu öffnen und sich umzusehen.
Die visuelle Kilometerzähler sind ein Gleichgewicht zwischen Geschwindigkeit und Bewegungsgenauigkeit. Diese Methode ist äußerst wichtig, da sie hilft, Hindernisse auf dem Weg des Rovers zu erkennen und zu vermeiden.
Automatische Navigationoder autonav ist die technologisch fortschrittlichste Methode. Es kann mit der Verwendung einer Drohne in einem Auto verglichen werden. Wir setzen uns ein gemeinsames Ziel und der Rover selbst sucht nach einem sicheren und schnellen Weg zum Ziel. Der Rover muss jeden Meter anhalten, um die Situation mit Kameras zu beurteilen. Anstatt eine einzige Aufnahme mit Navigationskameras zu machen, verwendet der Rover auch Hazcams. Dann kombiniert der Bordcomputer all diese Informationen und bildet eine "Gefahrenkarte". Problematische Orte sind rot markiert, Orte, an denen die Situation nicht so schlimm ist, sind gelb markiert, und der Bereich, der für die Werbung für den Router am besten geeignet ist, ist grün markiert.

Dies ist die langsamste Fortschrittsoption für einen Rover. Wenn der Rover in einer idealen Situation die Länge eines Fußballfeldes mit der oben erwähnten Blindmethode (dies sind ungefähr 100 m) zurücklegen kann, fährt der Rover im autonomen Modus unter idealen Bedingungen nur 30 Meter.
Gleichzeitig weiß der Rover nicht, wie er Sand oder scharfe Steine erkennt, sodass die Methode nur angewendet wird, wenn der Bereich absolut sicher ist.
Was können Sie von Ausdauer erwarten?
Die NASA erwartet, dass der neue Rover bereits am 18. Februar auf der Oberfläche des Planeten landet. Danach hoffe ich, dass er sich auf dem Mars bewegt. Alles, was ich oben gesagt habe, gilt für den neuen Rover, aber er verfügt über mehr Funktionen. Zum Beispiel kann er sich mindestens doppelt so schnell bewegen wie Curiosity: Der Onboard-PC verfügt über mehr Rechenressourcen und verbesserte Datenverarbeitungsalgorithmen. Die Navigationskameras des Roboters sind farbig und empfangen Bilder mit einer höheren Auflösung als Curiosity. Darüber hinaus hat der Rover dickere Räder als sein Vorgänger und ein anderes Profilmuster. Wissenschaftler glauben, dass die Räder weniger beschädigt werden.
Eine der wichtigsten Aufgaben für den Rover: Sammeln und Lagern von Proben für die Rückkehr zur Erde. Viel hängt vom Erfolg dieser Mission ab. Und jetzt, wenn der Rover anfängt sich zu bewegen, werden Sie verstehen, was und wie diese Bewegung bereitgestellt wird.
Hinweis: Evan Hilgemann ist Maschinenbauingenieur am Jet Propulsion Laboratory (JPL) der NASA.
