
Der einfachste Beschleunigungsmesser, wie funktioniert das?
Ein Beschleunigungsmesser ist ein Gerät, das die Projektion der scheinbaren Beschleunigung (die Differenz zwischen der tatsächlichen Beschleunigung eines Objekts und der Gravitationsbeschleunigung) misst. Wie es funktioniert, kann anhand eines einfachen Modells erklärt werden.
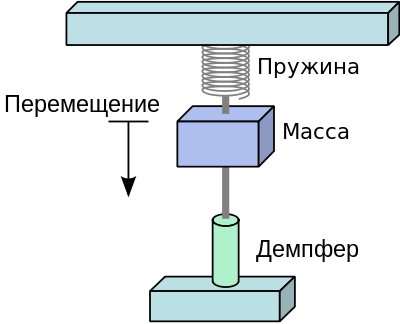
Modell des mechanischen Beschleunigungsmessers ( Original ) Mit
zunehmender Beschleunigung wird die Feder durch die Masse gedehnt. Nach dem Hookeschen Gesetz aus dem Lehrplan für Schulphysik können Sie die Beschleunigung des Systems leicht feststellen:
wobei k der Elastizitätskoeffizient der Feder ist, Ist seine Ausdehnung und m ist die Masse der Last.
Mit drei senkrecht angeordneten Sensoren ist es möglich, die Beschleunigung eines Objekts entlang von 3 Achsen zu ermitteln und die Position des Körpers im Raum zu kennen, wenn man die Anfangsbedingungen kennt.
Dieses einfache Modell ist die Grundlage für den Betrieb der meisten Beschleunigungsmesser, die in drei Hauptuntergruppen unterteilt werden können:
- mechanisch
- elektronisch
- piezoelektrisch
Es gibt auch thermische und optische, aber wir werden sie nicht berücksichtigen. Wenn bei mechanischen alles klar ist (tatsächlich spiegelt sich ihre Arbeit im Modell von oben wider), ist es bei elektronischen und piezoelektrischen etwas interessanter.
Piezoelektrischer Beschleunigungsmesser
Diese Art von Sensoren basiert auf dem Piezoeffekt, der 1954 von Smith in Halbleitern wie Germanium und Silizium entdeckt wurde. Diese Entdeckung gab der Entwicklung von Sensoren und Generatoren starke Impulse. Der Effekt ist die Erzeugung von Spannung durch das piezoelektrische Element bei Verformung.

Animation des piezoelektrischen Effekts ( Original )
Mit zunehmender Beschleunigung erhöht / verringert die inerte Masse den Druck auf das piezoelektrische Element. Dank des piezoelektrischen Effekts wird ein Signal erzeugt, das von der externen Beschleunigung abhängt.

Piezoelektrisches Beschleunigungsmessergerät ( Original )
Sensoren dieses Typs benötigen einen zusätzlichen Verstärker, der die Signalamplitude erhöht und einen niederohmigen Ausgang für die Arbeit mit externen Geräten erzeugt. Die Vorspannschraube wird verwendet, um den Nullbeschleunigungswert zu kalibrieren, dessen Masse so berechnet wird, dass sie dem Nullpunkt der Beschleunigung im System entspricht.
Sensoren dieses Typs sind immer noch weit verbreitet und werden hauptsächlich in Systemen eingesetzt, die eine hohe Zuverlässigkeit erfordern - im Automobilbereich. Für die kommerzielle Elektronik werden häufig elektronische Beschleunigungsmesser verwendet, die kleiner und billiger sind.
Elektronische Beschleunigungsmesser
Das Funktionsprinzip elektronischer Sensoren basiert auf einer Änderung der Kapazität von Kondensatoren mit einer Änderung der Beschleunigung. Das einfachste Arbeitsmodell ist im Bild dargestellt.
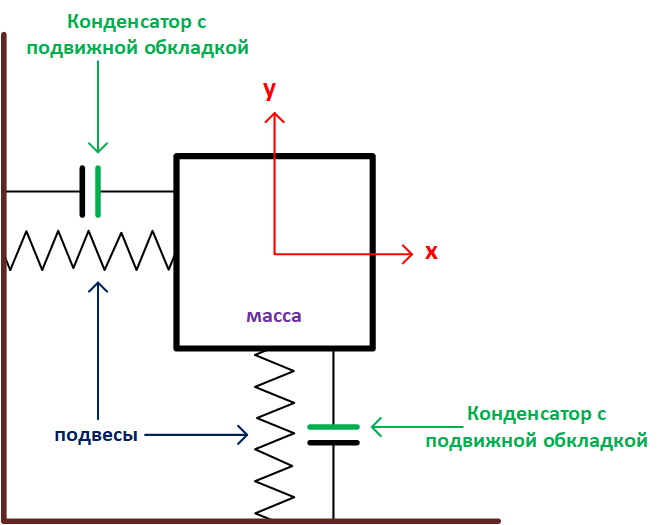
Die Vorrichtung eines 2-Achsen-elektromechanischen Beschleunigungsmessers
Wenn sich die Beschleunigung ändert, ändert die Masse den Abstand zwischen den Kondensatorplatten. Aus der einfachsten Formel für die Kapazität eines Kondensators Daraus folgt, dass sich auch die Kapazität des Kondensators ändert, wenn sich d im Abstand zwischen den Platten ändert. Diese Methode ist aufgrund der Entwicklung von MEMS - mikroelektromechanischen Systemen weit verbreitet.
MEMS-Technologien ermöglichen die Herstellung von Kondensatoren mit beweglichen Platten auf einem Siliziumsubstrat, wodurch die Größe des Geräts und, was nicht unwichtig ist, seine Kosten erheblich reduziert werden.

Das Gerät eines elektromechanischen 2-Achsen-Beschleunigungsmessers (Original aus dem Buch "Introductory MEMS" . Weitere Abbildungen stammen ebenfalls aus diesem Buch)
Der Leser muss eine Frage haben: "Wie genau kann eine Änderung der Kondensatorkapazität erfasst werden? Ich werde versuchen, eine erschöpfende Antwort auf diese Frage zu geben.
MEMS-Beschleunigungsmesser. Wie kann man aus einer Kapazitätsänderung ein Signal machen?
Kapazitive Halbbrücke
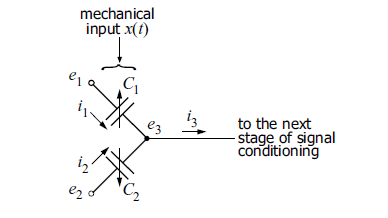
Bevor wir also die Funktionsweise des Sensors selbst beschreiben, wenden wir uns einer in der Schaltung recht beliebten Schaltung zu - der kapazitiven Halbbrücke.

Kapazitive Halbbrücke - die Basis von MEMS-
Spannungssensoren und eingegeben werden, und - Ausgangssignal für die anschließende Umwandlung. Die Kapazitäten beider Kondensatoren hängen von der externen Beschleunigung ab und ändern sich um den Wert x (t). Bei x = 0 sind die Ladungen auf den Containern identisch und gleichzeitig ... Vorausgesetzt, x << d, finden wir heraus, wie die Änderung der Kapazität der Kondensatoren von der Änderung der Position der Platte abhängt.
Ableitung der Formel zur Kapazitätsänderung
Schreiben wir die Änderung jeder Kapazität auf, wenn die Platte um x verschoben wird:
:
, :
, x <<d, xd d^2 , :
:
, :
, x <<d, xd d^2 , :
Nachdem ein Teil des Pfades passiert wurde, haben wir erfahren, wie der Wert der Kapazitätsänderung von der Änderung der Position der Platte (dh der externen Beschleunigung) abhängt. Es ist Zeit, diese Änderung zu erkennen: Wir führen zusätzliche Ströme ein - ... Nun bleibt zu berechnen, wie der Ausgangsstrom von der Änderung der Position der Platte abhängt.
Kapazitive Halbbrücke - Ströme
Ableitung der Formel für die Abhängigkeit des Ausgangsstroms von der Kapazitätsänderung
:
, dq/dt, q=CU, :
, (1.1):
, dq/dt, q=CU, :
, (1.1):
Wenn Sie also die gleichen Potentiale der Eingangsspannungen verwenden wir bekommen die Abhängigkeit des Stroms:
Das Ergebnis ist ziemlich seltsam: Der Ausgangsstrom hängt in keiner Weise von der Kapazitätsänderung ab. Um eine Änderung der Kapazität zu erfassen, müssen an den Platten Spannungen unterschiedlicher Polarität eingestellt werden, d. H. , ein ... Dann werden wir die Gleichung unter Berücksichtigung dieser Modifikation wiederholen.
Abhängigkeit des Stroms von der Änderung der Position der Platte unter Berücksichtigung der unterschiedlichen Polarität der Eingangsspannungen
1.3:
:
:
1.2 , :
:
:
1.2 , :
Aus dieser Gleichung sind die folgenden Tatsachen ersichtlich:
- Wenn sich die Position der Platten nicht zeitlich ändert, dann
- ähnlich, wenn die Signalquelle dann konstant (DC)
Für den effektiven Betrieb der kapazitiven Halbbrücke müssen variable Eingangssignale e1 und e2 verwendet werden, deren Phasenverschiebung 180 Grad beträgt (damit die Potentiale unterschiedliche Vorzeichen haben). Daher erhalten wir die folgende Form von Signalen:
wo - die Frequenz des Wechselsignals (bestimmt in der Entwurfsphase in Abhängigkeit von der Systembandbreite und dem normalen Betrieb der mechanischen Behälter).
Wir haben also Gleichung (1.4) erhalten, die zeigt, wie sich eine Änderung der Kondensatorkapazität auf die Leistung des Systems auswirkt. Ein solches Signal hat jedoch eine recht kleine Amplitude. Außerdem wird das gesamte System zusammenbrechen, wenn wir eine Last daran anschließen, um mit der Außenwelt zu kommunizieren. Hier wird ein Verstärker benötigt ...
Fügen Sie einfach einen Verstärker hinzu
Fügen wir unserem System einen Verstärker hinzu (wir gehen davon aus, dass die Verstärkung gleich ist - das Prinzip der virtuellen Erde funktioniert).
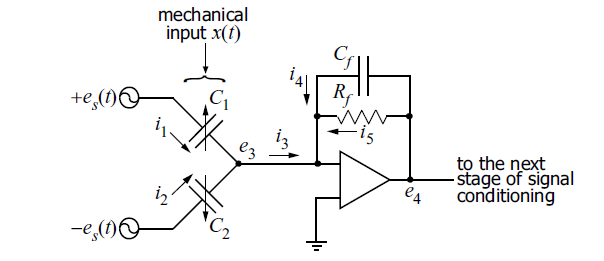
Kapazitive Halbbrücke + Integrator
Nun finden wir die Abhängigkeit der Ausgangsspannung des Verstärkers von der Kapazitätsänderung.
Verstärkerausgangsspannung
:
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
dq/dt, (1.4) :
, x, ( ). , , , ( 1 ). :
, :
, :
Als Ergebnis haben wir die Abhängigkeit des Verstärkerausgangssignals von der Änderung der Position der Kondensatorplatte erhalten. Der aufmerksame Leser sollte sofort bemerken, dass dies eine Amplitudenmodulation ist! In diesem System haben wir tatsächlich ein Signal x (t), das mit dem Signal multipliziert wird und verstärkt um den Betrag ... Der nächste Schritt besteht darin, die Trägerfrequenz zu entfernen und wir erhalten ein verstärktes Signal x (t) - das proportional zur Beschleunigung ist. Ein langer Weg der Datenverarbeitung hat uns dazu gebracht, die Architektur des MEMS-Beschleunigungsmessers zu verstehen.
MEMS-Beschleunigungsmesser-Architektur
Betrachten wir zunächst das Funktionsdiagramm des Sensors:
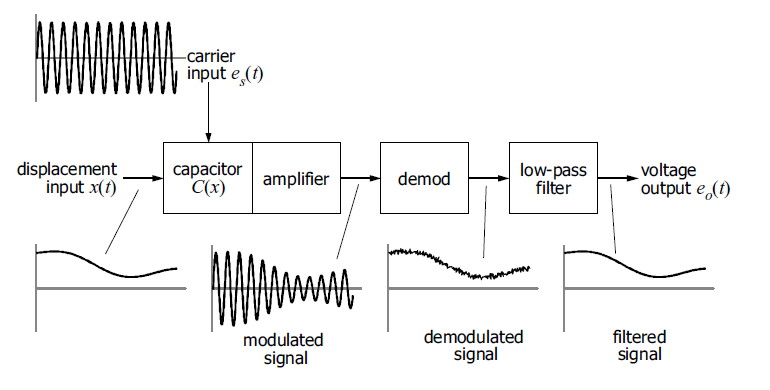
Funktionsdiagramm eines MEMS-Beschleunigungsmessers.
Zunächst haben wir ein Signal x (t) - das die Änderung der Beschleunigung widerspiegelt. Als nächstes multiplizieren wir es mit dem Trägersignal und mit einem Operationsverstärker (im Integratormodus) verstärkt. Als nächstes erfolgt eine Demodulation - die einfachste Schaltung - eine Diode und ein RC-Filter (in Wirklichkeit wird eine komplizierte Schaltung verwendet, die den Modulations- und Demodulationsprozess mit einer Trägerfrequenz synchronisiert ). Anschließend wird das Restrauschen mit einem Tiefpassfilter gefiltert.
Als Beispiel zitiere ich einen der ersten MEMS-Beschleunigungsmesser von Analog Devices - ADXL50:
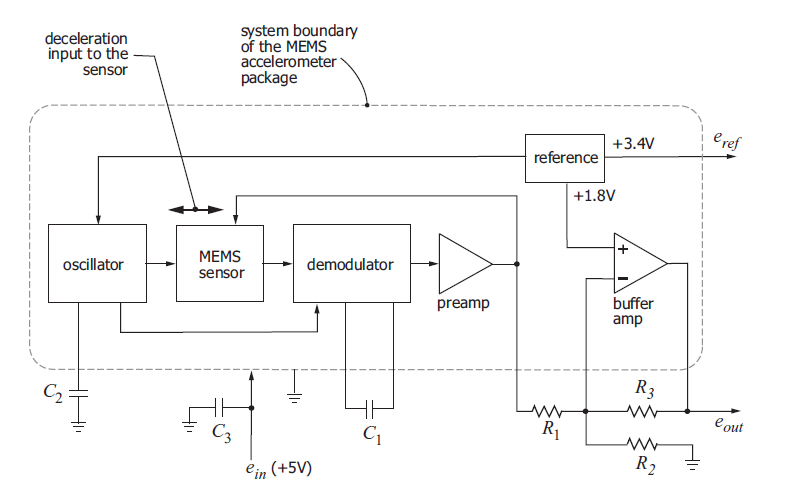
Blockdiagramm von ADXL50
Wahrscheinlich würden viele Leser angesichts des Blockdiagramms des Sensors am Anfang des Artikels den Zweck einiger Blöcke nicht verstehen. Jetzt ist der Schleier angelehnt, und wir können jeden von ihnen diskutieren:
- Der als „MEMS-Sensor“ bezeichnete Block ist eine kapazitive Halbbrücke.
- Der "Oszillator" -Block erzeugt ein Signal mit einer Frequenz von 1 GHz.
- Das Oszillatorsignal wird auch zur synchronen Demodulation verwendet.
- , ( VDD/2- , — «»).
- .
- , .
?
Die Wahl des Wandlers für die Arbeit mit Sensoren hängt von der gewünschten Genauigkeit ab. Für die Arbeit mit Sensoren eignen sich ADCs mit SAR- oder Delta-Sigma-Architektur mit hoher Bittiefe. Moderne Sensoren verfügen jedoch über eingebaute Wandler. Die Marktführer in dieser Richtung sind STMicroelectronics, Analog Devices und NXP. Als Beispiel können wir eine neue Mikroschaltung mit einem 3-Achsen-Beschleunigungsmesser und eingebautem ADC - ADXL362 - geben.

Blockdiagramm von ADXL362
Um mit dem ADC zu arbeiten, wurden der Schaltung Anti-Aliasing- Filter hinzugefügt, um zusätzliche Harmonische vom Eintritt in das Spektrum auszuschließen.
Woher bekommt man solche Technologie?
Es gibt jetzt viele Fabriken für Fabless-Unternehmen, die MEMS-Technologie anbieten. Um moderne Mikroschaltungen zu erzeugen, ist es jedoch erforderlich, Kapazitäten mit beweglichen Platten in eine Standardentwurfsroute zu integrieren, da zusätzlich zu einer solchen Kapazität zusätzliche Blöcke (Generator, Demodulator, Operationsverstärker usw.) auf einem einzelnen Chip entworfen werden müssen. Als Beispiel TSMC und XFAB Fabriken bieten modernste Technologie ein MEMS mit dem gesamten Gurtzeug Sensor entlang zu implementieren. Das Bild zeigt die Container, mit denen Sie einen dreiachsigen Beschleunigungsmesser erstellen können:
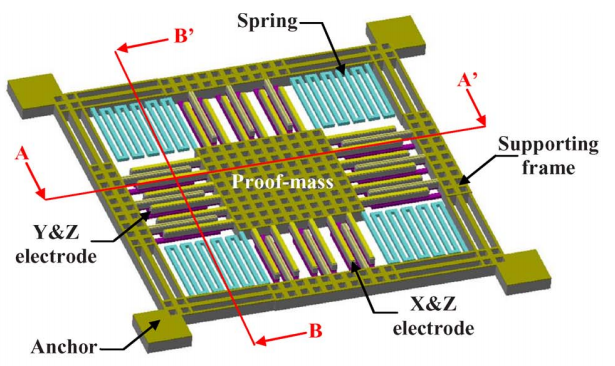
Dreiachsige kapazitive Halbbrücke von TSMC In Russland
gibt es auch eine Fabrik für die Herstellung von MEMS-Sensoren, Sovtest. Das Unternehmen verfügt jedoch nicht über die Technologie zur Integration zusätzlicher Schaltkreisblöcke, die für die Erstellung des Endgeräts erforderlich sind. Der einzige Ausweg ist die Verwendung der Mikromontagetechnologie .
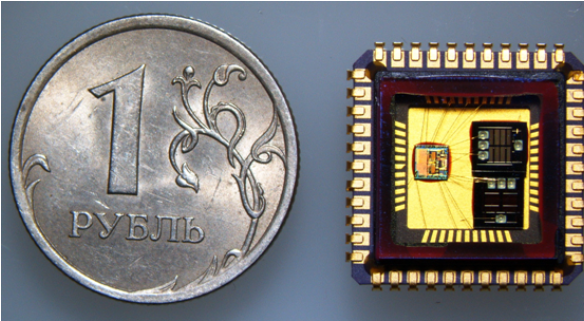
Von Sovtest entwickelter MEMS-Beschleunigungsmesser
Welche Entwicklungen hat unser Unternehmen in diese Richtung?
Wir haben mehrere Wandler, die für die Arbeit mit Sensoren ausgelegt sind. Neue Produkte umfassen:
- 5101NV035 - 16-Kanal-Wandler basierend auf 8 Delta-Sigma ADC, entwickelt für die Arbeit mit Stromsensoren
- 1316NX035 - 4-Kanal-Integrationsspannungs-Frequenzumrichter (VFC) für 3-Achsen-Beschleunigungsmesser und Gyroskope.
Wie ich im vorherigen Artikel geschrieben habe , kann die Wartezeit für Wafer aus der Fabrik ziemlich lange dauern. Nach dem ersten Testlauf des 400-MHz-ADC dauerte die Ankunftszeit der Platten und weitere Messungen mehr als ein halbes Jahr. In dieser Zeit gelang es unserem Team, PNC 1316NX035 (eine Entwicklung der vorherigen Schaltung 1316PP1U ) herzustellen , über die ich Ihnen ein wenig erzählen kann.
Spannungs-Frequenz-Wandler
Um Daten von einem Sensor zu konvertieren, werden normalerweise SAR- oder Delta-Sigma-ADCs verwendet. Es gibt jedoch auch einen anderen Konvertertyp - die Integration von VFCs, die erhebliche Vorteile haben:
- Sie nehmen weniger Platz in Anspruch und verbrauchen bei gleicher Linearität und Geräuschentwicklung weniger.
- Einfache Architektur.
- Hohe Störfestigkeit gegen Eingangsstörungen und Störsignale.
- Störfestigkeit und Interferenz des Ausgangssignals.
- Die Fähigkeit, Daten ohne Verarbeitung auf einen Funkfrequenz-Kommunikationskanal zu übertragen.
Die Mikroschaltung 1316HX035 ist ein vierkanaliger Spannungs-Frequenz-Wandler und ein digitaler Code. Die Ausgänge eines dreiachsigen Beschleunigungsmessers sind mit den drei hochpräzisen Hauptkanälen verbunden. Der 4. Kanal verfügt über einen 4-Kanal-Eingangsmultiplexer, an den Sie zusätzliche Systemsensoren anschließen können: Temperatur, Luftfeuchtigkeit usw. Unter einem Mikroskop sieht die Schaltung folgendermaßen aus:
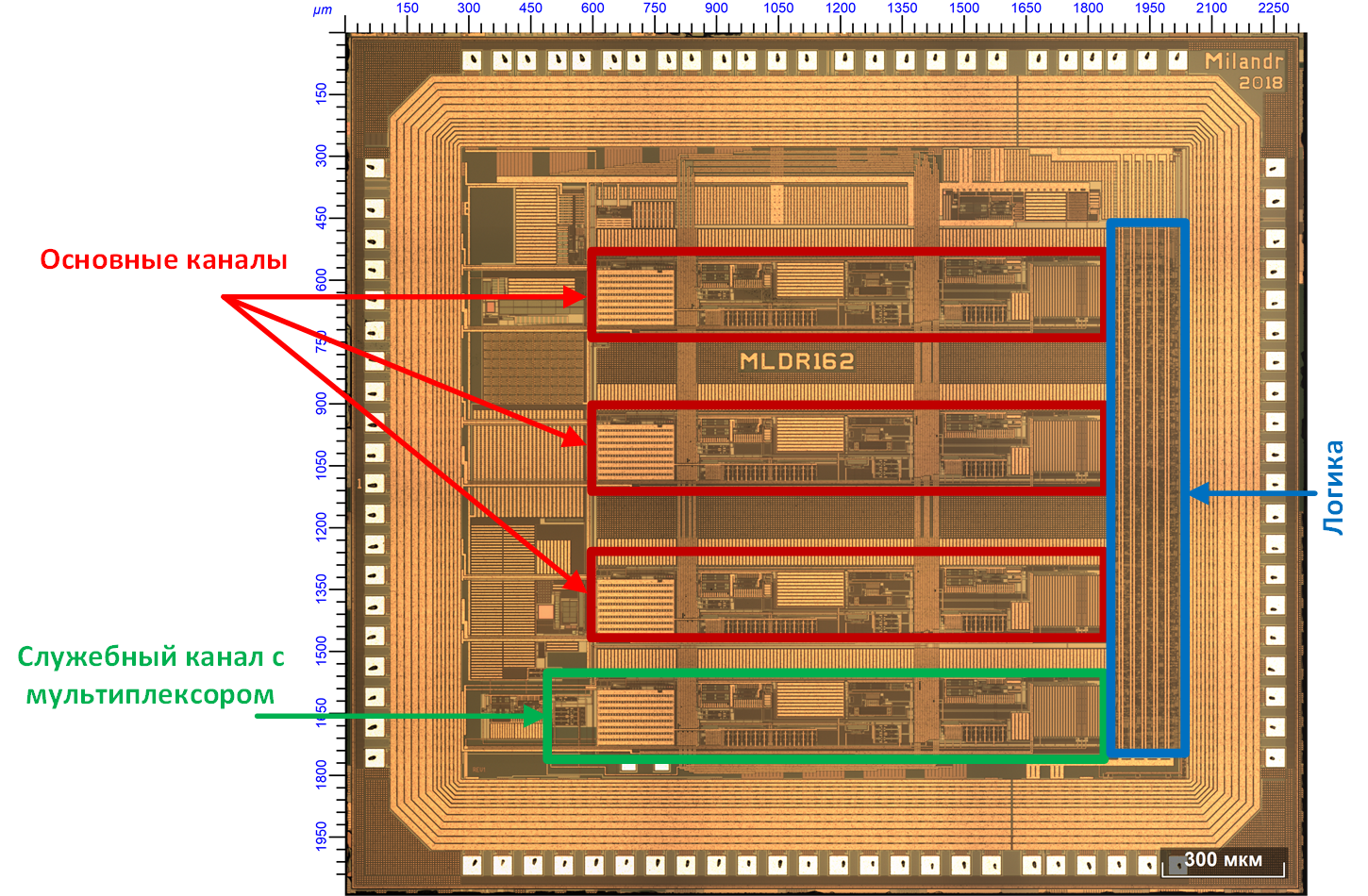
VFC unter dem Mikroskop
Jeder der drei Hauptkanäle wandelt die Eingangsspannung im Bereich von ± 4 V an 3 Ausgängen in eine Frequenz von bis zu 1250 kHz um, was positiven und negativen Eingangsspannungen entspricht. Außerdem verfügt die Mikroschaltung in jedem Kanal über einen 16-Bit-Rückwärtszähler zum Zählen von Frequenzimpulsen. Die SPI-Schnittstelle wird verwendet, um die Konvertierungsmodi zu steuern und den Inhalt der Kanalimpulszähler abzutasten. Die Hauptanforderungen für die PNC-Parameter waren:
- hohe thermische und zeitliche Stabilität der Ausgangsfrequenz bei Null-Eingangssignal (geerdete Eingänge)
- dynamischer Konvertierungsbereich - nicht weniger als 22 Bit
- Kontinuität der Umwandlung des Eingangssignals und Unzulässigkeit des Verlustes eines einzelnen Frequenzimpulses.
Um die Anforderungen 1 und 2 zu erfüllen, wird eine analoge Autokalibrierung verwendet , die beim Einschalten der Schaltung automatisch durchgeführt wird und jederzeit auf Befehl über die SPI-Schnittstelle gestartet werden kann. Anforderung 3 wird durch Schaltungslösungen bereitgestellt und garantiert. Es ist uns gelungen, recht anständige Genauigkeitsparameter zu erreichen: Die typische Nichtlinearität der Umwandlung betrug 30 ppm, und der Nullpunktversatz betrug weniger als 0,1 Hz bei einem Umrechnungsfaktor von 200 kHz / V. Konvertierungsdynamikbereich: fmax / fmin = 2 * 1,25 MHz / 0,3 Hz ∿ 8,33 M, was mehr als 23 Bit entspricht.
Es gibt nur ein "aber" - bipolare Ernährung. Um eine gute Nullstabilität (Spannung entsprechend 0 g Beschleunigung) zu gewährleisten, muss eine bipolare Versorgung verwendet werden. Diese Lösung ist sehr effektiv - schließlich ist das System a priori stabil, wenn 0 g „Masse“ entspricht. Es verbessert auch das Systemdesign. Bei modernen Sensoren wird die Hälfte der Vdd / 2-Versorgung als Null verwendet. Wenn sich die Spannung am Wandler jedoch von der Spannung am Sensor unterscheidet, erhalten wir automatisch einen Offset, der zusätzlich kalibriert werden muss.
Wahrscheinlich macht die bipolare Spannung für viele Verbraucher ein wenig Angst, und wir als Entwickler verstehen dies. Vielleicht werden wir in Zukunft eine kommerzielle Version für MEMS erstellen (oder den Sensor in den PNC integrieren). Bisher sind dies natürlich nur Pläne, aber ich bin sicher, dass sie das Licht der Welt erblicken werden.
PS Bonusfotos aus dem Beispielforschungsprozess gefunden. Im Allgemeinen ist dies für mich der interessanteste Teil des Entwicklungsprozesses. Ihre Idee wird Ihnen in der Hitze der Fabrik übergeben, Sie versorgen sie mit Strom und drücken die Daumen, Sie warten - "Funktioniert es oder nicht?"

PPS Wer das Thema Sensoren mochte, möchte in Zukunft ein Kollege des Hardware-Design-Centers über das Trägheitssystem sprechen, das auf MEMS-Sensoren - SINS - basiert .