
„In unserer Arbeit geht es im Wesentlichen darum, wie man spontanes Schaltverhalten mithilfe chaotischer Dynamik gestaltet“, sagt Co-Autor Kohei Nakajima, angewandter Mathematiker an der Universität Tokio in Japan. In der Regel entwerfen Ingenieure einen Roboter, der laufen und laufen kann, und der Experimentator kann dann eine externe Handsteuerung verwenden, um diese "Verhaltensweisen" zu ändern. Um jedoch von einer solchen kontrollierten Umgebung zu einer Umgebung zu gelangen, in der der Roboter das Verhalten autonom umschalten kann, versuchten die Forscher, chaotische Bewegungen zu simulieren. Chaotisches Routing tritt häufig im Gehirn von Tieren und anderen dynamischen Systemen auf, wenn ein System unvorhersehbar, aber deterministisch zwischen mehreren stereotypen Mustern wechselt, sei es Gehen, Laufen oder irgendeine andere Form von Verhalten.

Vergangene Erfahrungen
Laut dem Hauptautor Katsuma Inoue, einem Doktoranden an der Universität von Tokio, hat die Robotik in der Vergangenheit versucht, chaotische Bewegungen nachzuahmen. Ein 2006 entwickelter Roboter modellierte ein menschliches Kind mit einem somatosensorischen System und Hunderten von Motoren, die die Muskeln im Körper darstellen und jeweils mit mehreren chaotischen Oszillatoren verbunden sind - dem groben Äquivalent von Motoneuronen. Somatosensorische Systeme interagieren mit chaotischen Oszillatoren, die dann den "Muskeln" signalisieren, sich zu bewegen. Das System wurde entwickelt, um die frühe Entwicklung menschlicher motorischer Fähigkeiten nachzuahmen. Es reproduzierte chaotische Bewegungen, indem es mehrere stereotype Verhaltensweisen abwechselte, einschließlich Krabbeln und Überrollen.
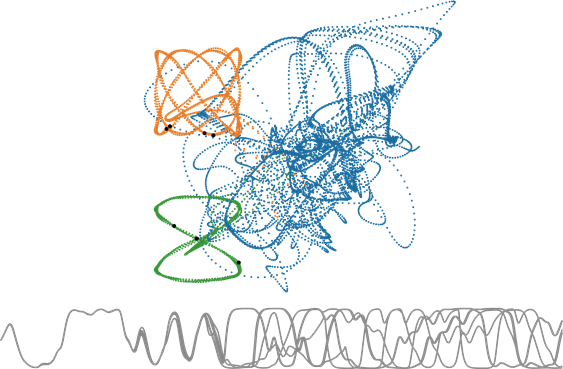
Die blauen, orangefarbenen und grünen Formen in diesem Bild repräsentieren verschiedene Verhaltensweisen, die die Autoren für ihr Robotergehirn entwickelt haben, um autonom zwischen diesen zu wechseln. Zu diesem Zweck haben Forscher Merkmale eines Phänomens geschaffen, das als chaotische Bewegung bezeichnet wird. Bild aus dem Vortrag „Entwerfen spontaner Verhaltenswechsel durch chaotische Reiseroute“ (Katsuma Inoue, Kohei Nakajima und Yasuo Kuniyoshi).
Andere Forschungen haben sich auf die Entwicklung des spontanen Schaltverhaltens in Robotern unter Verwendung einer hierarchischen Struktur mit einem übergeordneten neuronalen Netzwerk konzentriert, das Module auf niedrigerer Ebene antreibt, die jeder Art von Verhalten entsprechen. Laut Kohei Nakajima nimmt der Lernprozess in diesen Experimenten jedoch viel Zeit in Anspruch.
Wie ist das System einzigartig?
Um diese Probleme zu lösen, verwendeten japanische Forscher kein hierarchisches Design. Stattdessen identifizierten die Forscher in einer dreistufigen Methode unter Verwendung eines Frameworks für maschinelles Lernen zunächst mehrere mögliche Verhaltensweisen und trainierten das neuronale Netzwerk, um sie gemäß Befehlen zu reproduzieren. Die Forscher trainierten dann das Netzwerk, um zwischen diesen Verhaltensweisen in einer bestimmten Reihenfolge zu wechseln, und entwickelten schließlich probabilistische Übergänge zwischen diesen Verhaltensweisen unter Verwendung chaotischer Dynamik. Das Ergebnis war ein System mit Merkmalen chaotischer Bewegung.

(A) , . : - (ESN) ESN. ESN ESN, , ESN . ESN - , ESN ESN , 0. (B) . . , . , , CI. , . 1 , . 2 3 . 2 3.
Was wird als nächstes passieren?
Die Schlüsselidee der Studie ist es, eine einfachere und elegantere Methode zur Realisierung der spontanen Fortbewegung zu schaffen, ähnlich der von Tieren. Die Durchführung dieser Studie war jedoch bisher auf ein neuronales Netzwerk auf einem Computer beschränkt. Die Forscher planen nun, von Computern zu physischen Robotern zu wechseln, um endlich Maschinen zu schaffen, die sich autonom und spontan verhalten.
Die Plastizität des Geistes ist ein charakteristisches Merkmal des menschlichen Gehirns und ermöglicht es den Menschen, neues Wissen zu erwerben, ohne alte Erinnerungen zu zerstören. Wissenschaftler sehen in dieser Forschung einen Schritt zur Schaffung eines synthetischen Gehirns, das ein Gedächtnis haben kann, das über einen künstlichen Körper mit der Umwelt interagieren kann.
Referenzliste:
- Adam Smith. AI with “spontaneous” behaviour like animals developed [ ]. URL: www.independent.co.uk/life-style/gadgets-and-tech/scientists-ai-spontaneous-behaviour-animals-b1762407.html
- Amy MacDermott. New technique builds animal brain–like spontaneity into AI [ ]. URL: blog.pnas.org/2020/11/new-technique-builds-animal-brain-like-spontaneity-into-ai
- : Katsuma Inoue, Kohei Nakajima, Yasuo Kuniyoshi. Designing spontaneous behavioral switching via chaotic itinerancy [ ]. URL: advances.sciencemag.org/content/advances/6/46/eabb3989.full.pdf