Dies ist mein erster Artikel über Habré, daher bitte ich Sie, keine schweren Gegenstände zu werfen. Vielen Dank im Voraus.
Beginnen wir mit dem Hintergrund. Es war einmal, als ich auf ST ARM-Mikrocontroller umsteigen musste. Dies lag daran, dass PIC und AVR bereits Mangelware waren und neue Abenteuer wollten. Von denen, die in Bäckereien erhältlich sind, und einer großen Anzahl von Artikeln zum Thema "Schnellstart" fiel die Wahl auf den STM32F100.
Ich bin es gewohnt, bei IAR zu arbeiten. Ja, es gibt andere IDEs, aber die IAR-Funktion reicht mir: ein relativ praktischer Editor, kein schlechter Debugger, und es ist sehr praktisch, beim Debuggen mit Registern zu arbeiten.
Als ich versuchte, das erste Projekt zu machen, war ich enttäuscht - CMSIS! Alle anderen, aber für mich war (und bleibt) es Horror: viele Buchen, lange und unverständliche Strukturen für mich. Es war nicht interessant, sich mit all dem zu beschäftigen. Ich habe versucht, einige Beispiele zusammenzustellen, und festgestellt, dass dies nicht unsere Methode ist.
Gibt es keine anderen Möglichkeiten? Es gibt. Die in die IAR integrierte: iostm32f10xx4.h und ähnliche enthalten. Gar nicht so schlecht:
RCC_APB2ENR_bit.ADC1EN = 1; // ADCAlles was blieb war, es in Klassen zu stopfen und es zu benutzen. Und so tat er es. Nach einiger Zeit dauerte es, bis der Code für STM32f4xx erstellt war. Und hier wieder ein Hinterhalt - es gibt keine Inklusisten. Was zu tun ist? - schreibe dich. Ich analysierte die vorhandenen selbstgeschriebenen Bibliotheken und beschloss, etwas anders vorzugehen. Darum geht es in der Geschichte.
Start
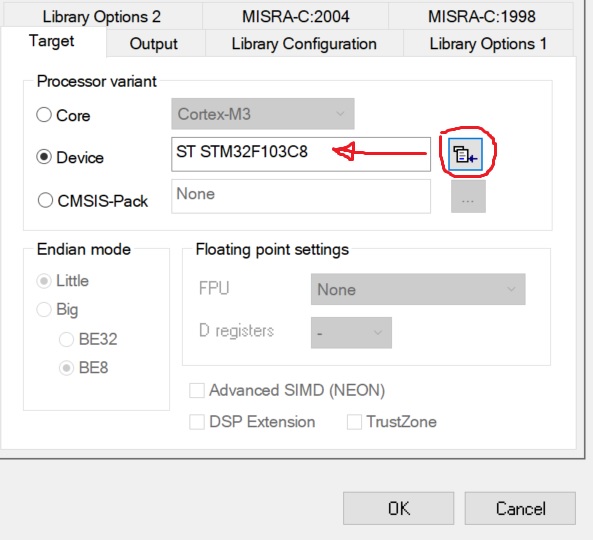
Ich werde nicht über die Installation von IAR und Treibern für den Debugger sprechen. Hier gibt es nichts Neues. Ich habe IAR 8 mit einem Code-Limit von 32 KB. Der auf der Pue-Platine installierte STM32F103-Controller ist für den Betrieb ausgewählt.
Starten Sie IAR, erstellen Sie ein C ++ - Projekt und wählen Sie den gewünschten Controller aus.
Der nächste Schritt besteht darin, die Dokumentation zu studieren. Wir werden uns für das Referenzhandbuch RM0008 interessieren. Die Hauptsache ist, sorgfältig zu lesen.
Als ich meinen Mitarbeitern das Programmieren von Controllern beibrachte, gab ich im Allgemeinen die Aufgabe, die LED (verbunden mit dem Controller-Zweig) einzuschalten, einen Debugger zu verwenden, Register zu bearbeiten und die Dokumentation zu lesen.
RCC-Modul. Verstauen
Dieses Modul wird normalerweise vergessen. Sie erinnern sich nur, wenn es unmöglich ist, die LED zu blinken.
Merken! Um Peripheriegeräte einzuschalten, müssen Sie Taktimpulse anlegen! Sie können nicht ohne es tun.
Die E / A-Ports befinden sich am APB2-Bus. In der Dokumentation finden wir ein Register zur Steuerung der Taktung dieses Busses. Dies ist RCC_APB2ENR:

Um die Taktung von Port C zu aktivieren (die LED ist nur an PC13 gelötet), müssen Sie eines in das IOPCEN-Bit schreiben.
Nun finden wir die Adresse des Registers RCC_APB2ENR. Sein Offset ist 0x18, die Basisadresse für die RCC-Register ist 0x40021000.
Um das Arbeiten mit Bits zu vereinfachen, erstellen wir eine Struktur:
typedef struct
{
uint32_t AFIOEN : 1;
uint32_t : 1;
uint32_t IOPAEN : 1;
uint32_t IOPBEN : 1;
uint32_t IOPCEN : 1;
uint32_t IOPDEN : 1;
uint32_t IOPEEN : 1;
uint32_t : 2;
uint32_t ADC1EN : 1;
uint32_t ADC2EN : 1;
uint32_t TIM1EN : 1;
uint32_t SPI1EN : 1;
uint32_t : 1;
uint32_t USART1EN : 1;
uint32_t :17;
} RCC_APB2ENR_b;
Um später nicht zu leiden, werden wir sofort alle Registeradressen auflisten:
enum AddrRCC
{
RCC_CR = 0x40021000,
RCC_CFGR = 0x40021004,
RCC_CIR = 0x40021008,
RCC_APB2RSTR = 0x4002100C,
RCC_APB1RSTR = 0x40021010,
RCC_AHBENR = 0x40021014,
RCC_APB2ENR = 0x40021018,
RCC_APB1ENR = 0x4002101C,
RCC_BDCR = 0x40021020,
RCC_CSR = 0x40021024
};
Jetzt muss noch der Code geschrieben werden, um die Peripheriegeräte zu aktivieren:
static void EnablePort(uint8_t port_name)
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
switch (port_name)
{
case 'A': apb2enr->IOPAEN = 1; break;
case 'a': apb2enr->IOPAEN = 1; break;
case 'B': apb2enr->IOPBEN = 1; break;
case 'b': apb2enr->IOPBEN = 1; break;
case 'C': apb2enr->IOPCEN = 1; break;
case 'c': apb2enr->IOPCEN = 1; break;
case 'D': apb2enr->IOPDEN = 1; break;
case 'd': apb2enr->IOPDEN = 1; break;
case 'E': apb2enr->IOPEEN = 1; break;
case 'e': apb2enr->IOPEEN = 1; break;
}
}
Vergessen Sie bei der Arbeit mit Registern nicht die Flüchtigkeit , da wir sonst nach der Optimierung durch den Compiler lange nach Fehlern suchen und die Compiler-Entwickler beschimpfen.
Wir tun dasselbe, um die Taktung anderer Peripheriegeräte zu ermöglichen.
Als Ergebnis haben wir die folgende Klasse erhalten (nicht alles ist aufgelistet):
STM32F1xx_RCC.h
#pragma once
#include "stdint.h"
namespace STM32F1xx
{
class RCC
{
protected:
enum AddrRCC
{
RCC_CR = 0x40021000,
RCC_CFGR = 0x40021004,
RCC_CIR = 0x40021008,
RCC_APB2RSTR = 0x4002100C,
RCC_APB1RSTR = 0x40021010,
RCC_AHBENR = 0x40021014,
RCC_APB2ENR = 0x40021018,
RCC_APB1ENR = 0x4002101C,
RCC_BDCR = 0x40021020,
RCC_CSR = 0x40021024
};
typedef struct {
uint32_t HSION : 1;
uint32_t HSIRDY : 1;
uint32_t : 1;
uint32_t HSI_TRIM : 5;
uint32_t HSI_CAL : 8;
uint32_t HSEON : 1;
uint32_t HSERDY : 1;
uint32_t HSEBYP : 1;
uint32_t CSSON : 1;
uint32_t : 4;
uint32_t PLLON : 1;
uint32_t PLLRDY : 1;
uint32_t : 6;
} RCC_CR_b;
typedef struct {
uint32_t SW : 2;
uint32_t SWS : 2;
uint32_t HPRE : 4;
uint32_t PPRE1 : 3;
uint32_t PPRE2 : 3;
uint32_t ADC_PRE : 2;
uint32_t PLLSRC : 1;
uint32_t PLLXTPRE : 1;
uint32_t PLLMUL : 4;
uint32_t USBPRE : 1;
uint32_t : 1;
uint32_t MCO : 3;
uint32_t : 5;
} RCC_CFGR_b;
typedef struct
{
uint32_t TIM2EN : 1;
uint32_t TIM3EN : 1;
uint32_t TIM4EN : 1;
uint32_t : 8;
uint32_t WWDGEN : 1;
uint32_t : 2;
uint32_t SPI2EN : 1;
uint32_t : 2;
uint32_t USART2EN : 1;
uint32_t USART3EN : 1;
uint32_t : 2;
uint32_t I2C1EN : 1;
uint32_t I2C2EN : 1;
uint32_t USBEN : 1;
uint32_t : 1;
uint32_t CANEN : 1;
uint32_t : 1;
uint32_t BKPEN : 1;
uint32_t PWREN : 1;
uint32_t : 3;
} RCC_APB1ENR_b;
typedef struct
{
uint32_t AFIOEN : 1;
uint32_t : 1;
uint32_t IOPAEN : 1;
uint32_t IOPBEN : 1;
uint32_t IOPCEN : 1;
uint32_t IOPDEN : 1;
uint32_t IOPEEN : 1;
uint32_t : 2;
uint32_t ADC1EN : 1;
uint32_t ADC2EN : 1;
uint32_t TIM1EN : 1;
uint32_t SPI1EN : 1;
uint32_t : 1;
uint32_t USART1EN : 1;
uint32_t :17;
} RCC_APB2ENR_b;
typedef struct {
uint32_t DMAEN : 1;
uint32_t : 1;
uint32_t SRAMEN : 1;
uint32_t : 1;
uint32_t FLITFEN : 1;
uint32_t : 1;
uint32_t CRCEN : 1;
uint32_t :25;
} RCC_AHBENR_r;
public:
static void EnablePort(uint8_t port_name)
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
switch (port_name)
{
case 'A': apb2enr->IOPAEN = 1; break;
case 'a': apb2enr->IOPAEN = 1; break;
case 'B': apb2enr->IOPBEN = 1; break;
case 'b': apb2enr->IOPBEN = 1; break;
case 'C': apb2enr->IOPCEN = 1; break;
case 'c': apb2enr->IOPCEN = 1; break;
case 'D': apb2enr->IOPDEN = 1; break;
case 'd': apb2enr->IOPDEN = 1; break;
case 'E': apb2enr->IOPEEN = 1; break;
case 'e': apb2enr->IOPEEN = 1; break;
}
}
static void DisablePort(char port_name)
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
switch (port_name)
{
case 'A': apb2enr->IOPAEN = 0; break;
case 'a': apb2enr->IOPAEN = 0; break;
case 'B': apb2enr->IOPBEN = 0; break;
case 'b': apb2enr->IOPBEN = 0; break;
case 'C': apb2enr->IOPCEN = 0; break;
case 'c': apb2enr->IOPCEN = 0; break;
case 'D': apb2enr->IOPDEN = 0; break;
case 'd': apb2enr->IOPDEN = 0; break;
case 'E': apb2enr->IOPEEN = 0; break;
case 'e': apb2enr->IOPEEN = 0; break;
}
}
static void EnableAFIO()
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
apb2enr->AFIOEN = 1;
}
static void DisableAFIO()
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
apb2enr->AFIOEN = 0;
}
static void EnableI2C(int PortNumber)
{
switch (PortNumber)
{
case 1:
{
volatile RCC_APB1ENR_b* apb1enr = reinterpret_cast<RCC_APB1ENR_b*>(RCC_APB1ENR);
apb1enr->I2C1EN = 1;
break;
}
case 2:
{
volatile RCC_APB1ENR_b* apb1enr = reinterpret_cast<RCC_APB1ENR_b*>(RCC_APB1ENR);
apb1enr->I2C2EN = 1;
break;
}
}
}
static void EnableUART(int PortNumber)
{
switch (PortNumber)
{
case 1:
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
apb2enr->USART1EN = 1;
break;
}
case 2:
{
volatile RCC_APB1ENR_b* apb1enr = reinterpret_cast<RCC_APB1ENR_b*>(RCC_APB1ENR);
apb1enr->USART2EN = 1;
break;
}
case 3:
{
volatile RCC_APB1ENR_b* apb1enr = reinterpret_cast<RCC_APB1ENR_b*>(RCC_APB1ENR);
apb1enr->USART3EN = 1;
break;
}
}
}
static void DisableUART(int PortNumber)
{
switch (PortNumber)
{
case 1:
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
apb2enr->USART1EN = 0;
break;
}
case 2:
{
volatile RCC_APB1ENR_b* apb1enr = reinterpret_cast<RCC_APB1ENR_b*>(RCC_APB1ENR);
apb1enr->USART2EN = 0;
break;
}
case 3:
{
volatile RCC_APB1ENR_b* apb1enr = reinterpret_cast<RCC_APB1ENR_b*>(RCC_APB1ENR);
apb1enr->USART3EN = 0;
break;
}
}
}
static void EnableSPI(int PortNumber)
{
switch (PortNumber)
{
case 1:
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
apb2enr->SPI1EN = 1;
break;
}
case 2:
{
volatile RCC_APB1ENR_b* apb1enr = reinterpret_cast<RCC_APB1ENR_b*>(RCC_APB1ENR);
apb1enr->SPI2EN = 1;
break;
}
}
}
static void DisableSPI(int PortNumber)
{
switch (PortNumber)
{
case 1:
{
volatile RCC_APB2ENR_b* apb2enr = reinterpret_cast<RCC_APB2ENR_b*>(RCC_APB2ENR);
apb2enr->SPI1EN = 0;
break;
}
case 2:
{
volatile RCC_APB1ENR_b* apb1enr = reinterpret_cast<RCC_APB1ENR_b*>(RCC_APB1ENR);
apb1enr->SPI2EN = 0;
break;
}
}
}
static void EnableDMA()
{
volatile RCC_AHBENR_r* ahbenr = reinterpret_cast<RCC_AHBENR_r*>(RCC_AHBENR);
ahbenr->DMAEN = 1;
}
static void DisableDMA()
{
volatile RCC_AHBENR_r* ahbenr = reinterpret_cast<RCC_AHBENR_r*>(RCC_AHBENR);
ahbenr->DMAEN = 0;
}
};
}
Jetzt können Sie eine Datei in main.cpp anhängen und Folgendes verwenden:
#include "STM32F1xx_RCC.h"
using namespace STM32F1xx;
int main()
{
RCC::EnablePort('c');
return 0;
}
Jetzt können Sie mit den Ports arbeiten. GPIO
Öffnen Sie den Abschnitt E / A für allgemeine Zwecke und alternative Funktionen in der Dokumentation. Suchen Sie die Port-Bit-Konfigurationstabelle:

Die CNF-Bits [1: 0] setzen den Port-Betriebsmodus (Analogeingang, Digitaleingang, Ausgang), die MODE-Bits [1: 0] entsprechen der Port-Betriebsgeschwindigkeit im Ausgangsmodus.
Werfen wir einen Blick auf die Register GPIOx_CRL und GPIOx_CRH (x = A, B, C, ...). Sie

können sehen, dass die Bits nacheinander verlaufen:
CNF [1: 0], MODE [1: 0] und
dann Konstanten mit den Betriebsmodi der Ports erstellen
enum mode_e
{
ANALOGINPUT = 0,
INPUT = 4,
INPUTPULLED = 8,
OUTPUT_10MHZ = 1,
OUTPUT_OD_10MHZ = 5,
ALT_OUTPUT_10MHZ = 9,
ALT_OUTPUT_OD_10MHZ = 13,
OUTPUT_50MHZ = 3,
OUTPUT_OD_50MHZ = 7,
ALT_OUTPUT_50MHZ = 11,
ALT_OUTPUT_OD_50MHZ = 15,
OUTPUT_2MHZ = 2,
OUTPUT_OD_2MHZ = 6,
ALT_OUTPUT_2MHZ = 10,
ALT_OUTPUT_OD_2MHZ = 14,
OUTPUT = 3,
OUTPUT_OD = 7,
ALT_OUTPUT = 11,
ALT_OUTPUT_OD = 15
};dann sieht die Methode für die Konfiguration folgendermaßen aus:
// pin_number -
void Mode(mode_e mode)
{
uint32_t* addr;
if(pin_number > 7)
addr = reinterpret_cast<uint32_t*>(GPIOA_CRH);
else
addr = reinterpret_cast<uint32_t*>(GPIOA_CRL);
int bit_offset;
if(pin_number > 7)
bit_offset = (pin_number - 8) * 4;
else
bit_offset = pin_number * 4;
uint32_t mask = ~(15 << bit_offset);
*addr &= mask;
*addr |= ((int)mode) << bit_offset;
}Jetzt können wir bequemere Methoden zur Auswahl eines Modus erstellen:
void ModeInput() { Mode(INPUT); }
void ModeAnalogInput() { Mode(ANALOGINPUT); }
void ModeInputPulled() { Mode(INPUTPULLED); }
void ModeOutput() { Mode(OUTPUT); }
void ModeOutputOpenDrain() { Mode(OUTPUT_OD); }
void ModeAlternate() { Mode(ALT_OUTPUT); }
void ModeAlternateOpenDrain() { Mode(ALT_OUTPUT_OD); }In der Dokumentation finden wir die Adressen der Steuerregister für die Ports und listen sie auf:
enum AddrGPIO
{
PortA = 0x40010800,
GPIOA_CRL = 0x40010800,
GPIOA_CRH = 0x40010804,
GPIOA_IDR = 0x40010808,
GPIOA_ODR = 0x4001080C,
GPIOA_BSRR = 0x40010810,
GPIOA_BRR = 0x40010814,
GPIOA_LCKR = 0x40010818,
PortB = 0x40010C00,
PortC = 0x40011000,
PortD = 0x40011400,
PortE = 0x40011800,
PortF = 0x40011C00,
PortG = 0x40012000
};Lange überlegt, die Basisadresse und Offsets oder absolute Adressen zu verwenden. Am Ende blieb ich bei letzterem stehen. Dies erhöht den Overhead, ist jedoch beim Debuggen leichter im Speicher zu finden.
Lassen Sie uns die Methode modernisieren:
if(pin_number > 7)
addr = reinterpret_cast<uint32_t*>(GPIOA_CRH - PortA + PortAddr);
else
addr = reinterpret_cast<uint32_t*>(GPIOA_CRL - PortA + PortAddr);Vielleicht hat jemand ein Augenzucken, aber ich habe mir noch kein schöneres ausgedacht.
Um den Zweig in den gewünschten logischen Zustand zu versetzen, reicht es aus, das entsprechende Bit in das ODRx-Register zu schreiben. Zum Beispiel so:
void Set(bool st)
{
uint32_t* addr;
addr = reinterpret_cast<uint32_t*>(GPIOA_ODR - PortA + PortAddr);
if(st)
*addr |= 1 << pin_number;
else
{
int mask = ~(1 << pin_number);
*addr &= mask;
}
}Sie können auch die GPIOx_BSRR-Register verwenden, um den Status zu steuern.
Analog machen wir Methoden zum Lesen des Portstatus, Methoden zur Konfiguration und Initialisierung (vergessen Sie nicht, die Taktung zu aktivieren). Als Ergebnis haben wir die folgende Klasse für die Arbeit mit Ports erhalten:
STM32F1xx_Pin.h
#pragma once
#include <stdint.h>
#include "STM32F1xx_RCC.h"
namespace STM32F1xx
{
class Pin
{
public:
enum mode_e
{
ANALOGINPUT = 0,
INPUT = 4,
INPUTPULLED = 8,
OUTPUT_10MHZ = 1,
OUTPUT_OD_10MHZ = 5,
ALT_OUTPUT_10MHZ = 9,
ALT_OUTPUT_OD_10MHZ = 13,
OUTPUT_50MHZ = 3,
OUTPUT_OD_50MHZ = 7,
ALT_OUTPUT_50MHZ = 11,
ALT_OUTPUT_OD_50MHZ = 15,
OUTPUT_2MHZ = 2,
OUTPUT_OD_2MHZ = 6,
ALT_OUTPUT_2MHZ = 10,
ALT_OUTPUT_OD_2MHZ = 14,
OUTPUT = 3,
OUTPUT_OD = 7,
ALT_OUTPUT = 11,
ALT_OUTPUT_OD = 15
};
private:
enum AddrGPIO
{
PortA = 0x40010800,
GPIOA_CRL = 0x40010800,
GPIOA_CRH = 0x40010804,
GPIOA_IDR = 0x40010808,
GPIOA_ODR = 0x4001080C,
GPIOA_BSRR = 0x40010810,
GPIOA_BRR = 0x40010814,
GPIOA_LCKR = 0x40010818,
PortB = 0x40010C00,
PortC = 0x40011000,
PortD = 0x40011400,
PortE = 0x40011800,
PortF = 0x40011C00,
PortG = 0x40012000
};
private:
int pin_number;
int PortAddr;
public:
Pin() { }
Pin(char port_name, int pin_number) { Init(port_name, pin_number); }
~Pin()
{
Off();
ModeAnalogInput();
}
public:
void Init(char port_name, int pin_number)
{
this->pin_number = pin_number;
RCC::EnablePort(port_name);
switch (port_name)
{
case 'A': PortAddr = PortA; break;
case 'a': PortAddr = PortA; break;
case 'B': PortAddr = PortB; break;
case 'b': PortAddr = PortB; break;
case 'C': PortAddr = PortC; break;
case 'c': PortAddr = PortC; break;
case 'D': PortAddr = PortD; break;
case 'd': PortAddr = PortD; break;
case 'E': PortAddr = PortE; break;
case 'e': PortAddr = PortE; break;
}
}
void ModeInput() { Mode(INPUT); }
void ModeAnalogInput() { Mode(ANALOGINPUT); }
void ModeInputPulled() { Mode(INPUTPULLED); }
void ModeOutput() { Mode(OUTPUT); }
void ModeOutputOpenDrain() { Mode(OUTPUT_OD); }
void ModeAlternate() { Mode(ALT_OUTPUT); }
void ModeAlternateOpenDrain() { Mode(ALT_OUTPUT_OD); }
void NoPullUpDown()
{
uint32_t* addr;
if(pin_number > 7)
addr = reinterpret_cast<uint32_t*>(GPIOA_CRH - PortA + PortAddr);
else
addr = reinterpret_cast<uint32_t*>(GPIOA_CRL - PortA + PortAddr);
int bit_offset;
if(pin_number > 7)
bit_offset = (pin_number - 8) * 4;
else
bit_offset = pin_number * 4;
int mask = ~((1 << 3) << bit_offset);
*addr &= mask;
}
void Mode(mode_e mode)
{
uint32_t* addr;
if(pin_number > 7)
addr = reinterpret_cast<uint32_t*>(GPIOA_CRH - PortA + PortAddr);
else
addr = reinterpret_cast<uint32_t*>(GPIOA_CRL - PortA + PortAddr);
int bit_offset;
if(pin_number > 7)
bit_offset = (pin_number - 8) * 4;
else
bit_offset = pin_number * 4;
uint32_t mask = ~(15 << bit_offset);
*addr &= mask;
*addr |= ((int)mode) << bit_offset;
}
void Set(bool st)
{
uint32_t* addr;
addr = reinterpret_cast<uint32_t*>(GPIOA_ODR - PortA + PortAddr);
if(st)
*addr |= 1 << pin_number;
else
{
int mask = ~(1 << pin_number);
*addr &= mask;
}
}
void On()
{
uint32_t* addr;
addr = reinterpret_cast<uint32_t*>(GPIOA_ODR - PortA + PortAddr);
int bit_offset = pin_number;
*addr |= 1 << bit_offset;
}
void Off()
{
uint32_t* addr;
addr = reinterpret_cast<uint32_t*>(GPIOA_ODR - PortA + PortAddr);
int bit_offset = pin_number;
int mask = ~(1 << bit_offset);
*addr &= mask;
}
bool Get()
{
uint32_t* addr = reinterpret_cast<uint32_t*>(GPIOA_IDR - PortA + PortAddr);
int bit_offset = pin_number;
int mask = (1 << bit_offset);
bool ret_val = (*addr & mask);
return ret_val;
}
};
};
Nun, lass uns versuchen:
#include "STM32F1xx_Pin.h"
using namespace STM32F1xx;
Pin led('c', 13);
int main()
{
led.ModeOutput();
led.On();
led.Off();
return 0;
}
Wir gehen den Debugger durch und stellen sicher, dass die LED zuerst aufleuchtet (nach led.ModeOutput ();), dann erlischt (led.On ();) und wieder aufleuchtet (led.Off ();). Dies liegt daran, dass die LED über die Stromleitung mit dem Bein verbunden ist. Wenn der Pin niedrig ist, leuchtet die LED daher auf.
Keine großartigen Summen
In diesem Artikel habe ich versucht (ich hoffe es ist gelungen) zu zeigen, wie Sie Ihr Leben ein wenig vereinfachen und den Code lesbarer machen können. Oder umgekehrt - wie man es nicht macht. Jeder wird für sich selbst entscheiden.
Es war möglich, nur Wrapper für CMSIS zu schreiben, aber das ist nicht interessant.
Vielen Dank für Ihre Zeit. Wenn Sie an der Fortsetzung interessiert sind, lassen Sie es mich wissen.