
Die Haut ist nicht nur das größte Organ in unserem Körper, sondern auch das größte sensorische System, das jede Sekunde Informationen über äußere Reize und deren Auswirkungen auf unseren Körper sammelt. Aus mechanischer Sicht ist die Rekonstruktion der menschlichen Haut nicht so schwierig, sondern es handelt sich nur um eine künstliche Schutzschicht ohne neuronale Aktivität. Wissenschaftler der Royal University of Technology in Melbourne (Melbourne, Australien) haben ein System künstlicher Sensoren entwickelt, die verschiedene menschliche Hautsensoren nachahmen. Was war erforderlich, um eine so komplexe Nachahmung zu erzeugen, was ist das Funktionsprinzip des Geräts, welche Reize kann es wahrnehmen und wo kann diese Entwicklung angewendet werden? Antworten auf diese und andere Fragen finden wir im Bericht der Wissenschaftler. Gehen.
Forschungsgrundlage
Das sensorische System der menschlichen Haut kann in mehrere Teilsysteme unterteilt werden, von denen jedes für bestimmte Reize verantwortlich ist. Die häufigsten und wichtigsten Rezeptoren sind Druckrezeptoren (Pacini-Körperchen), Temperaturrezeptoren (Thermorezeptoren) und Schmerzrezeptoren (Nozizeptoren).
Jeder dieser Rezeptoren sammelt Informationen und überträgt Signale an das menschliche Gehirn, um sie zu verarbeiten und geeignete Entscheidungen zu treffen. Andere sensorische Systeme (Sehen, Hören, Schmecken, Riechen) haben ein ähnliches Funktionsprinzip.
Es ist logisch, dass ein solches biologisches System selbst unter Berücksichtigung moderner taktiler Sensoren und CMOS (komplementäre Metalloxid-Halbleiter-Struktur) äußerst schwer zu reproduzieren ist.
Es gibt Entwicklungen, die einen künstlichen Nozizeptor basierend auf einem Diffusionsmembran * implementieren, der einen Normalzustand aufweisen kann, der aus einem angespannten und entspannenden Stadium des Nozizeptors sowie einem abnormalen Zustand mit Allodynie * und Hyperalgesie * des Nozizeptors unter Verwendung externer Reize als Spannung besteht.
Der Memristor * ist ein passives Element in der Mikroelektronik, das seinen Widerstand in Abhängigkeit von der durch ihn geleiteten Ladung ändern kann.
Allodynie * ist ein abnormaler Schmerz, der durch einen Reizstoff verursacht wird, der normalerweise nicht schmerzhaft ist (z. B. Schmerzen bei leichter Berührung).Laut Wissenschaftlern sind diese Entwicklungen äußerst wichtig, da der Schaltmechanismus des Memristors von den leitenden Filamenten abhängt, deren Durchmesser ungefähr Subnanometer beträgt. Durch die Verwendung des thermoelektrischen Moduls und des piezoelektrischen Druckmoduls ist es möglich, den Spannungs- und Relaxationszustand unter den vier Hauptfunktionen des Nozizeptors erfolgreich zu erreichen.
Hyperalgesie * - eine ungewöhnlich hohe Empfindlichkeit des Körpers gegenüber schmerzhaften Reizen.
Gegenwärtig wird eine ähnliche Technik verwendet, um ein künstliches Auge zu erzeugen, aber ihre Implementierung im Format künstlicher Haut wurde noch nicht erreicht.
In dieser Arbeit demonstrieren Wissenschaftler einen funktionierenden Prototyp künstlicher elektronischer Rezeptoren, die Pacinis kleinen Körper, Thermorezeptor und Nozizeptor nachahmen. Dies wurde durch eine Kombination mehrerer Funktionskomponenten erreicht:
- Memristor zur Entscheidungsfindung auf Basis von Strontiumtitanat SrTiO3 (STO) mit Sauerstoffmangel;
- Drucksensor auf Basis von Zugelastomergold (Polydimethylsiloxan, d. H. PDMS);
- Temperaturauslöser basierend auf Vanadiumoxid (VO 2 ) mit Phasenwechsel.
Der Hauptunterschied dieses Konzepts zu den vorherigen besteht darin, dass für die praktische Implementierung von Somatosensoren keine separaten und komplexen thermoelektrischen Module und piezoelektrischen Drucksensoren erforderlich sind. Folglich werden bei der Entwicklung äußerst kostengünstige und leicht verfügbare Dünnoxidfilme sowie tragbare Drucksensoren auf biokompatiblem PDMS verwendet.
Forschungsergebnisse
Bevor Sie etwas erstellen, müssen Sie sich überlegen, was und wie in der endgültigen Version funktionieren wird. Mit dem Ziel, künstliche Hautrezeptoren zu schaffen, wurde eine hypothetische Grundlage für die Implementierung funktioneller Pacini-Körper, Thermorezeptoren und Nozizeptoren entwickelt (Abbildung unten).

Bild 1
Menschliche Somatosensoren sind über die Hörner (Vorsprünge der grauen Substanz) mit dem Rückenmark verbunden, wodurch Informationen an das Gehirn übertragen werden ( 1a ). Es gibt spezielle Möglichkeiten, um Druck (blau bei 1a ) und Temperatur (rot bei 1a ) zu bestimmen .
Pacinis Körper sind Schichten von Membranen, die mit Flüssigkeit gefüllt sind. Fingerabdrücke sind ein Paradebeispiel für Pacinis kleinen Körper. Wenn lokaler Druck auf den Körper ausgeübt wird, wird ein Teil des Körpers deformiert, was zu einer Verschiebung der chemischen Ionen (z. B. Natrium oder Kalium) führt und infolgedessen ein Rezeptorpotential an den Nervenenden der Haut entsteht. Dieses Rezeptorpotential erzeugt bei Erreichen einer ausreichenden Energie (Schwelle) einen elektrischen Impuls innerhalb des Korpuskels, der sich durch das Zentralnervensystem bewegt, um eine motorische Reaktion über Nervenfasern zu aktivieren (blau bei 1a ).
Wenn die Hauttemperatur über 30 ° C steigt, erkennt der Thermorezeptor Wärme und löst Aktionspotentiale aus. Die Anregungsfrequenz steigt mit zunehmender Reiztemperatur, bis sie den Sättigungswert erreicht. Zusätzlich beginnen die Hitze-Nozizeptoren, die Schmerzsignale aufnehmen, bei etwa 45 ° C zu feuern. Diese Zellen sind auf die Erkennung schädlicher Hitze und Verbrennungen spezialisiert.
Wenn ein an einem freien Nervenende befindliches thermisches Neuron einen schädlichen Reiz empfängt, wird eine elektrische Antwort an den Nozizeptor gesendet, um zu vergleichen, ob die Amplitude des Reizes die Schwelle überschreitet, um ein Aktionspotential zu erzeugen und es über das Rückenmark an das Zentralnervensystem zu senden (rot bei 1a ).
Um ähnliche künstliche Rezeptoren zu erzeugen, wurden Gold- und PDMS-Druckwandler verwendet, die mit und ohne Druck zwischen Zuständen mit niedrigem Widerstand (LRS) und hohem Widerstand (HRS) umschalten, um Pacini-Körperchen ( 1b und 1c ) zu simulieren .
Um das Verhalten von Thermorezeptoren und Nozizeptoren nachzuahmen, wurde ein VO 2 -Phasenübergang verwendet , der bei Temperaturen über der Übergangstemperatur (68 ° C) von HRS bei Raumtemperatur zu LRS übergehen kann.
Zusätzlich wurde der resistive Schaltspeicher STO (Strontiumtitanat) als Entscheidungselement für die Bewertung der Schwellenwerte verwendet.
Bei einem künstlichen Pacini-Körper ist der Strom durch den Entscheidungsmemistor (I 1 ) aufgrund der Vorspannung nicht ausreichend, um die Motorantwort ( 1b ) auszulösen, wenn kein Druck erkennbar ist . Wenn Druck angelegt wird, wechselt der Sender in den HRS-Modus und blockiert I 2 , sodass maximaler Strom durch den Memristor fließen kann. Aufgrund des höheren I 1 schaltet der STO-basierte Memristor auf das LRS um. Folglich fließt ein höherer Strom durch den Körper und verursacht eine motorische Reaktion ( 1c ).
Im Fall des Thermorezeptors und Nozizeptors VO 2kann bei der Sperrschichttemperatur eine Widerstandsänderung von drei bis vier Größenordnungen aufweisen. Wenn die Temperatur unter der Sperrschichttemperatur liegt, ist VO 2 ein Isolator.
Somit fließt eine kleine Strommenge durch den Empfänger, und die am Memristor auftretende Spannung reicht nicht aus, um ihn einzuschalten ( 1d ). Wenn die Sperrschichttemperatur erreicht ist, schaltet VO 2 auf das LRS um, wodurch ein höheres Potential am Memristor auftritt, wodurch es auf das LRS umschaltet. Wenn sich sowohl VO 2 als auch STO im LRS befinden, fließt ein erhöhter Strom durch den Rezeptor ( 1e ).
Künstlicher Körper von Pacini
Nach der Erstellung des Konzepts für das zukünftige Gerät begannen die Wissenschaftler mit einer schrittweisen Implementierung. Die erste Stufe war die Schaffung eines künstlichen Pacini-Körpers, für den ein Memristor auf der Basis von sauerstoffarmem STO mit einer Stapelstruktur verwendet wurde: Pt (100 nm) / Ti (10 nm) / STO (55 nm) / Pt (25 nm) / Ti (7 nm) und ein SiO 2 -Substrat .
Die untere Ti-Schicht wird als Klebeschicht der unteren Pt-Schicht verwendet, und die obere Ti-Schicht wird als Sauerstoffreservoir und auch als Klebeschicht der oberen Pt-Schicht verwendet. Die untere Pt-Schicht nimmt am Schaltvorgang teil, während die obere als inertes Material dient, das verhindert, dass TiO 2 Umgebungssauerstoff ausgesetzt wird.
Die Druckwandlerarchitektur ist von Pacinis biologischem Korpuskel inspiriert, der eine helikale Form mit einer Spurbreite von 100 Mikrometern aufweist. Der Durchmesser der gesamten Spule beträgt 7,8 mm. Zur Herstellung eines Sensors wurde Au (200 nm) / Cr (20 nm) auf einem PDMS mit einer Dicke von 300 μm abgeschieden.
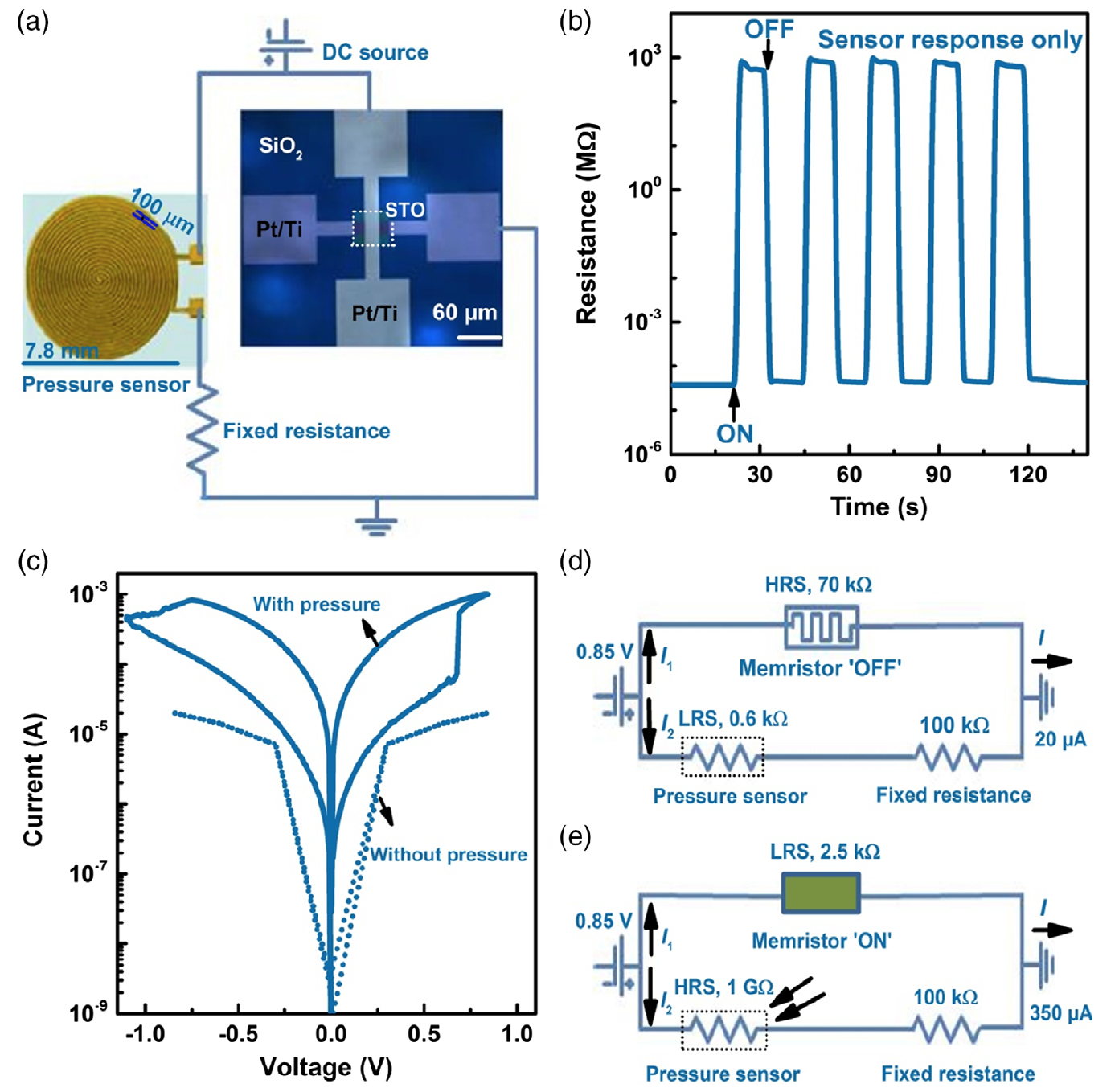
Bild 2
Bild 2a zeigt ein künstliches Äquivalent eines kleinen Körpers mit der Integration eines Memristors und eines Drucksensors.
Das Drucksensornetzwerk arbeitet so, dass der Rezeptor den Memristor aktivieren kann, der als Entscheidungskomponente fungiert.
In biologischen Systemen kann die Entscheidungskomponente bei Erreichen eines ausreichenden Rezeptorpotentials einen elektrischen Impuls zur Aktivierung des Motors des Zentralnervensystems erzeugen. Um diese Funktion mit einem bestimmten Schwellenwert zu replizieren, muss der Drucksensor einen bestimmten Bereich von Druckwerten erfassen. Um die Effizienz des Systems zu demonstrieren, haben die Wissenschaftler beschlossen, diesen Punkt auf nur zwei Werte zu vereinfachen: Es gibt starken Druck und es gibt überhaupt keinen Druck.
Ein fester Widerstand von 100 kΩ wurde gewählt, um den Strom durch das Drucksensornetzwerk zu begrenzen, das einen Widerstand von nur 0,6 kΩ hat. Dies stellt sicher, dass das System ohne Druck einen sehr geringen Strom anzeigt. Abbildung 2bzeigt die Reaktion und Wiederholbarkeit eines eigenständigen Druckmessumformers.
Wenn Druck angelegt wird, geht der Druckwandler aufgrund von Verformungen und Rissen, die bei Wandlern auf PDMS-Basis sehr häufig sind, in einen sehr HRS mit einem Widerstand von etwa 1 GΩ über. Verformungen und Risse können die Leistung des Druckwandlers nach mehreren Zyklen beeinträchtigen, dies verhindert jedoch nicht die Demonstration des künstlichen Wandlerkonzepts selbst. Wenn der Druck abgelassen wird, schließen sich die gerissenen Lücken wieder und es entsteht ein LRS, wodurch der Sensor in seinen ursprünglichen Zustand zurückkehrt.
Ein ähnliches Muster wird bei biologischen Sensoren beobachtet, die sich ebenfalls verformen, was zu einer Verschiebung chemischer Ionen führt, wenn Druck ausgeübt wird.
Es ist zu beachten, dass die Entscheidungskomponente, die aus dem STO-Memristorelement besteht, anfänglich durch Anlegen einer Vorspannung bei einem sehr niedrigen Strom von 1 & mgr; A an die obere und untere Elektrode galvanisch geformt werden muss. Diese Stufe erzeugt einen lokalisierten Kanal für die Bildung leitender Filamente durch die STO. Ein Spannungsdurchlauf ist dann erforderlich, um das Gerät zwischen HRS- und LRS-Zuständen umzuschalten.
Es ist auch wichtig, dass der durch den Memristor fließende Strom ohne den angelegten Druck nicht ausreicht, um ihn zu schalten. Wenn jedoch Druck ausgeübt wird, tritt der Sensor, der den Zweig enthält, in den HRS-Zustand ein, was zum maximalen Potential des Rezeptors am Memristor führt ( 1s)). Wenn die Schwelle des Rezeptorpotentials erreicht ist, wechselt der Entscheidungsmemistor vom HRS-Zustand in den LRS-Zustand ( 2c ). In diesem Zustand schaltet die angelegte Sequenz 0 → +0,85 V → 0 → 1,12 V → 0 das Gerät für den positiven Zyklus in den LRS-Zustand und für den negativen Halbzyklus ( 2d und 2e ) in den HRS-Zustand .
Um ein Gerät in LRS umzuwandeln, wird nur der positive Halbzyklus berücksichtigt. Gemäß Bild 2d hat die Drucksensorschaltung, wenn kein Druck angelegt wird, einen Gesamtwiderstand von 100,6 kΩ, während die parallele Entscheidungskomponente (Memristor) einen Widerstand von 70 kΩ hat. Somit beträgt der äquivalente Widerstand des gesamten Pacini-Körpers 41,2 kΩ.
Dieser Ersatzwiderstand führt nur 0,02 mA Strom durch den gesamten Stromkreis, was als entspannter Zustand angesehen werden kann. Durch Anlegen von Druck wird der Drucksensorkreis in einen extrem hohen Widerstand von 1 GΩ umgewandelt, während der Widerstand des Memristors nur etwa 2,5 kΩ beträgt, wodurch sich der äquivalente Widerstand des gesamten Pacini-Körpers um etwa 2,5 kΩ ändert. Dieser Zustand niedriger Impedanz ermöglicht einen Strom ≥ 0,35 mA im gesamten Stromkreis.
Somit erzeugt der Druckreiz ein Antwortsignal, das fast 18-mal höher ist als in einem entspannten Zustand, wodurch das Zentralnervensystem seine motorische Antwort auslösen kann. Nachdem die Motorreaktion abgeschlossen ist, kann mit nicht verwendeten Elektroden eine Verpolung an den Memristor angelegt werden, um den Pacini-Körper zu initialisieren.
Künstlicher Thermorezeptor
Um einen Thermorezeptor an der Basis des Memristors zu erzeugen, wurde dieselbe Stapelstruktur wie für den kleinen Pacini-Körper verwendet, d.h. Metall-Isolator-Metall (MIM).
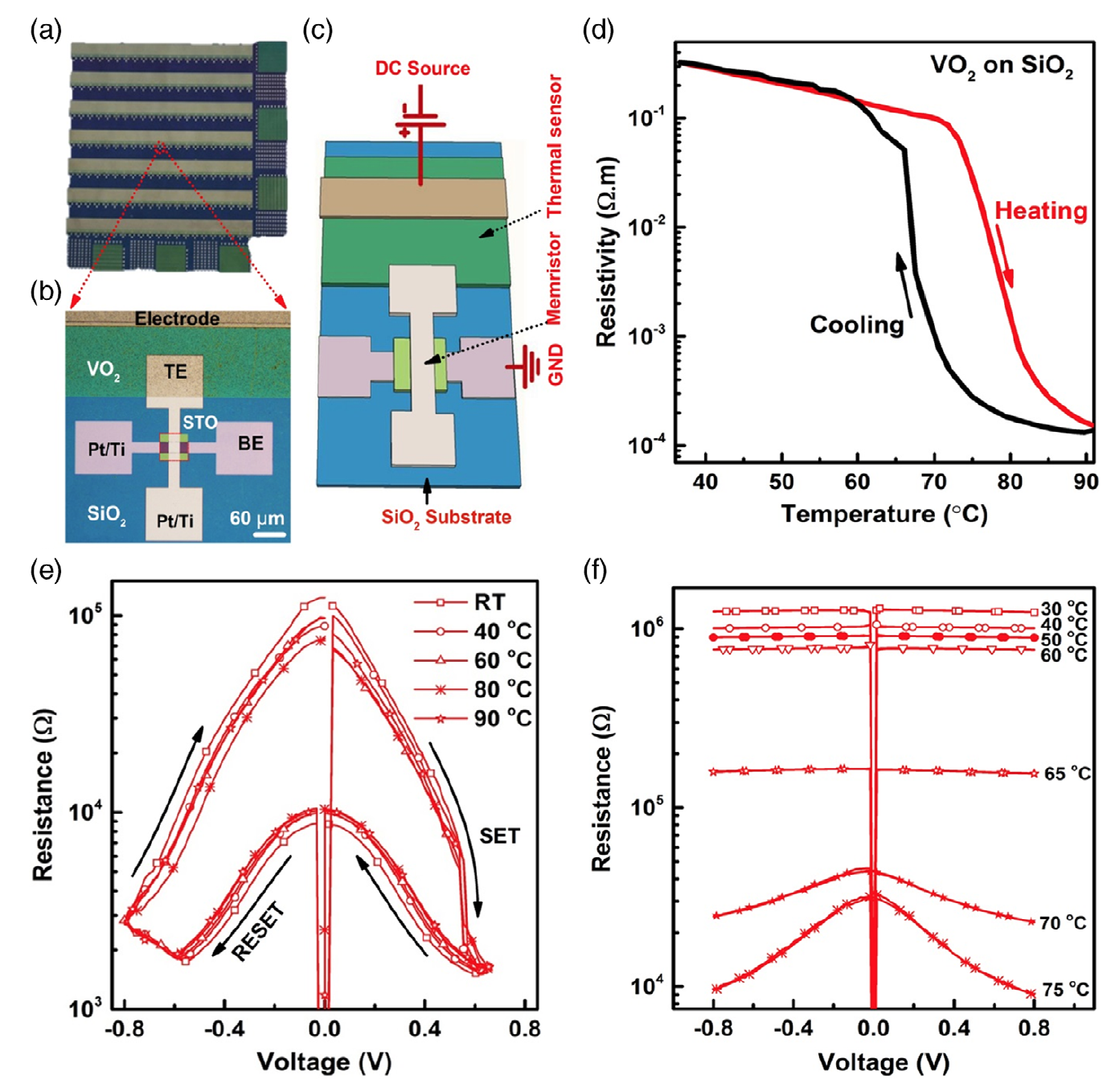
Bild №3
Part oberes Elektron in Verbindung mit der Oberfläche des VO verwendeten 2 ( 3 a und 3b ) , um nacheinander einen Wärmesensor verbindet. Um die gesamte Vorrichtung zu verschieben, wurde diese Pt (100 nm) / Ti (10 nm) -Elektrodenschicht auf der VO 2 -Oberfläche abgeschieden . Zwischen der Anfangselektrode und der oberen Memristorelektrode wurde ein erheblicher Abstand von 100 µm eingehalten.
Im Bild 3czeigt ein Thermorezeptor-Verbindungsdiagramm, in dem die Vorspannung über das Metall an den Wärmesensor angelegt wird und die Masse (GND im Diagramm) mit der unteren Elektrode des Memristors verbunden ist, um die Entscheidung zu treffen.
Diagramm 3d zeigt die Widerstands-Temperatur-Kurve für den Übergang von Dielektrikum zu Metall auf einem VO 2 -Dünnfilm . Wenn die Übergangstemperatur erreicht ist, fällt der spezifische Widerstand offensichtlich um vier Größenordnungen ab. Offensichtliche thermische Hysterese wird auch in Heiz- und Kühlzyklen beobachtet. Es wurde auch festgestellt, dass es keinen merklichen Einfluss der Temperatur auf das Widerstandsschalten gab ( 3e ).
Der Memristor kann die Widerstandsänderung von 100 kΩ auf 2 kΩ während des Schaltvorgangs anzeigen. Für eine klarere Analyse wurde jedoch beschlossen, den Widerstand des HRS-Zustands als 93 kΩ und den Widerstand des LRS-Zustands als 9 kΩ bei 80 mV Lesespannung (V READ ) zu betrachten, da bei dieser Spannung das maximale Schaltverhältnis R OFF / R ON beobachtet wird . Die Spannungsschaltsequenz des fertigen Offline-Geräts war: 0 → +0,65 V → 0 → 0,80 V → 0. Wenn dieselbe Sequenz an den gesamten Thermorezeptor angelegt wird, nimmt der Widerstand ab und daher steigt der Rezeptorstrom mit zunehmender Temperatur ( 3f ).
Um die erforderliche Schaltspannung bereitzustellen, wurde die Empfängertemperatur bei 70 ° C gehalten. Dies soll sicherstellen, dass sich VO 2 im LRS-Zustand befindet. Durch Anlegen einer Vorspannung von 0 bis 2 V wird die Vorrichtung ( 4a ) vollständig eingestellt und zurückgesetzt .
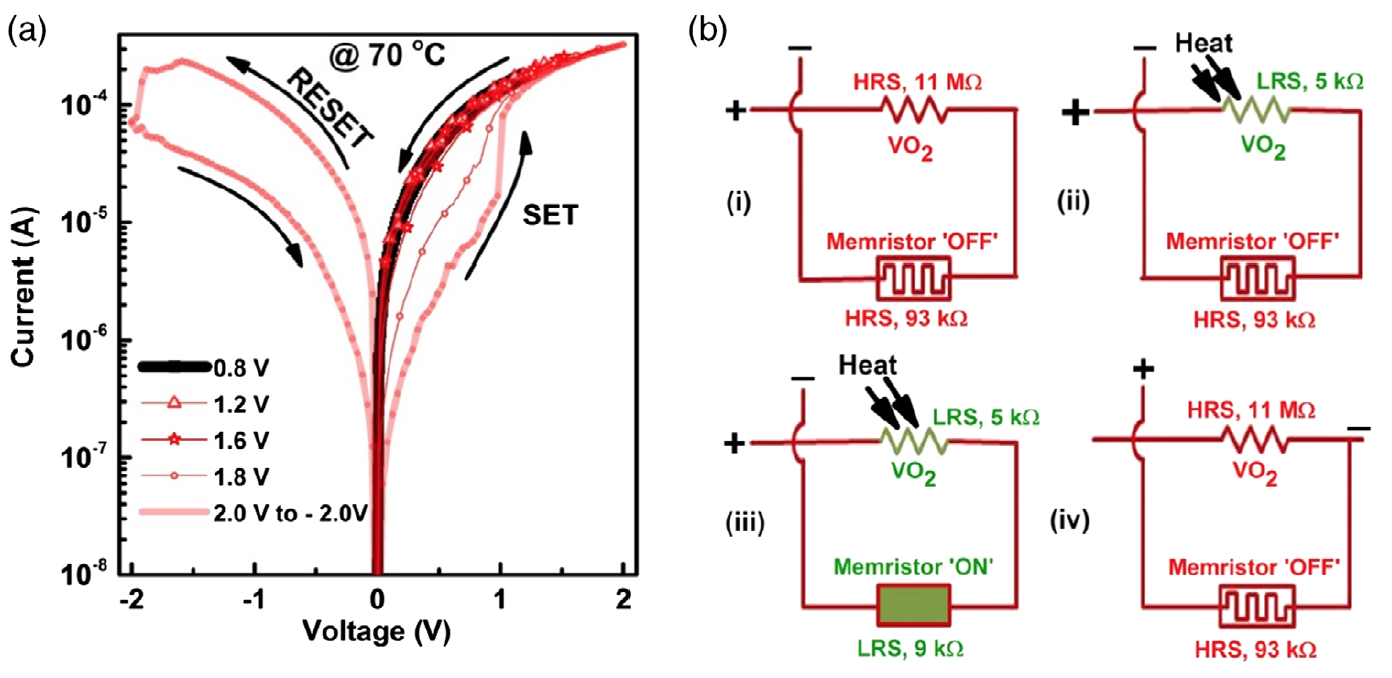
Bild 4
Für einen Memristor, der eine Entscheidung trifft, ist der Anfangswiderstand von 93 kΩ viel niedriger als der HRS des Wärmesensors, der 11 MΩ beträgt. Somit kann die am Entscheidungsmemristor auftretende Teilspannung die VSET-Schwelle für die Umwandlung von HRS in LRS nicht erreichen. Daher befinden sich sowohl der Wärmesensor als auch der Memristor im HRS-Zustand, wodurch ein minimaler Strom durch den Thermorezeptor fließen kann [ 4b (i) ].
Wenn eine kritische Temperatur von 70 ° C angelegt wird, nimmt der Widerstand des Temperatursensors um vier Größenordnungen ab und die Teilspannung des Memristors steigt mit zunehmender Rezeptorantwort allmählich auf die SET-Spannung an [ 4b (ii) ]. Sobald der VSET den Memristor einschaltet, geht er vom HRS mit einem Widerstand von 9 kΩ in den LRS [ 4b (iii) ].
In diesem Stadium wird die maximale Rezeptorantwort gebildet. Der LRS-Speicher bleibt auch dann lange bestehen, wenn der thermische Stimulus vollständig deaktiviert ist. Um den Memristor neu zu programmieren, kann das negative Spannungs-VRESET ihn von LRS zu HRS übertragen [ 4b (iv) ]. Hierzu kann an nicht verwendeten Elektroden ( 3c ) eine negative Spannung angelegt werden .
Künstlicher Nozizeptor
Man kann mit Sicherheit sagen, dass sich Nozizeptoren erheblich von ihren Gegenstücken unterscheiden. Nozizeptoren kommen im gesamten menschlichen Körper vor und befinden sich am Ende des Axons des sensorischen Neurons.
Um die Exposition gegenüber schädlichen Reizen zu vermeiden, reagiert der Nozizeptor auf zwei Arten: normal und abnormal.
Wenn ein in der Haut endender Nerv unter normalen Bedingungen einen schädlichen Reiz erhält, wird ein Antwortsignal an den Nozizeptor gesendet, um zu vergleichen, ob das Signal einen bestimmten Schwellenwert überschreitet, und um zu entscheiden, ob ein Aktionspotential für das Zentralnervensystem erzeugt werden muss. In diesem normalen Zustand wird der Nozizeptor für eine Zeit, die als Relaxationsprozess bekannt ist, langsam ausgeschaltet. Durch die Nutzung dieser Schwelle und des Entspannungsprozesses isoliert der Nozizeptor den Körper vor unerwünschten kritischen und kontinuierlichen Reizen.
Eine abnormale Reaktion tritt auf, wenn der Körper Reizen nahe der Schwelle für eine Schädigung des Nozizeptors ausgesetzt ist, und in diesem Zustand wirkt der Nozizeptor als normaler Rezeptor, um weitere Schäden zu vermeiden. Wenn die Verletzung immer noch erhalten wurde, erhöht sich die Anfälligkeit des betroffenen Gewebes. Das nozizeptive System passt sich dieser erhöhten Anfälligkeit an, indem es die nozizeptive Schwelle lokal senkt und die nozizeptive Reaktion erleichtert, wodurch ein angemessener Gewebeschutz bereitgestellt wird.
Der Nozizeptor zeigt unter abnormalen Bedingungen zwei unterschiedliche Verhaltensweisen: Allodynie und Hyperalgesie.
Allodynie reagiert bei einer niedrigeren Schwelle, während Hyperalgesie eine stärkere Reaktion hervorruft, wenn die Schwelle überschritten wird, was darauf hinweist, dass es im abnormalen Zustand keine Nozizeptorschwelle gibt.
Um das Verhalten des künstlichen Thermorezeptors unter normalen Bedingungen zu beobachten, der bei schädlichen Reizen als Nozizeptor wirkt, wurde das Gerät auf LRS umgeschaltet und der Messwert bei V READ 80 mV abgelesen .
Da die Reaktion des biologischen Nozizeptors stark von der Intensität des Stimulus abhängt, wurde der künstliche Nozizeptor einer Reihe von Temperaturstimuli mit unterschiedlichen Intensitäten im Bereich von 66 bis 82 ° C ausgesetzt ( 5a ).

Bild Nr. 5
Grafik 5b zeigt das Antwortsignal relativ zur Intensität des angelegten thermischen Stimulus. Es ist zu beachten, dass sich der Nozizeptor erst einschaltet, wenn der Temperaturimpuls 68 ° C erreicht, was der Übergangstemperatur des verwendeten VO entspricht2 . Wenn also der VO 2 aufgrund eines temperaturinduzierten Übergangs das LRS verfehlt, beginnt ein hoher Strom durch die Schaltung zu fließen. Ein solcher Befehl ähnelt biologischen Systemen, in denen der Nozizeptor ein Aktionspotential erzeugt, das das Gehirn auslöst, wenn die Stärke des Stimulus Werte über dem kritischen Wert erreicht.
Ein weiterer Anstieg der Reizintensität über den Schwellenwert führt zu einem größeren Strom, der auch mit der Reaktion des biologischen Analogons übereinstimmt: Je höher die Reizintensität, desto höher die Ansprechintensität. Grafik 5c zeigt die Heiz- und Kühlreize und die entsprechende Reaktion bei 68 ° C.
Grafik 5dzeigt die Dämpfung des Antwortsignals über die Zeit nach dem Ausschalten des schädlichen Stimulus, d.h. Ein Relaxationsprozess, der durch VO 2 bestimmt wird , da es keinen Temperatureffekt auf den STO-basierten Memristor gibt.
Aufgrund der Tendenz, dass der VO 2 -Widerstand mit abnehmender Temperatur im Laufe der Zeit zunimmt, begrenzt der künstliche Nozizeptor den Strom durch die Schaltung, und daher wird eine Abnahme der Intensität der Antwortsignale beobachtet.
Eine stärkere Reaktion aufgrund höherer Reize erfordert eine relativ längere Zeit für eine vollständige Entspannung. Beispielsweise dauert es 100 s, bis die Reaktion bei 68 ° C einen Basisstrom von 0,5 μA erreicht, während sich die Reaktion bei 80 ° C in 100 s nicht vollständig entspannen kann.
Um das Verhalten der Vorrichtung unter abnormalen Bedingungen zu beobachten, wurde ein Stimulus auf den künstlichen Nozizeptor angewendet, dessen Intensität viel höher war als unter normalen Bedingungen.
Der Nozizeptor wurde mit einer Geschwindigkeit von 20 Grad pro Minute auf 90 ° C erhitzt und auf 60 ° C abgekühlt, was unter normalen Bedingungen unter dem Schwellenwert (68 ° C) liegt.
Darauf folgte ein erneutes Erwärmen von 60 auf 90 ° C, das erforderlich ist, um das Vorhandensein / Fehlen einer Erzeugung eines gesenkten Schwellenwerts und einer verbesserten Reaktion zu bestimmen, die die Haupteigenschaften von Allodynie und Hyperalgesie sind.
Die Sequenz 60 → 90 → 60 → 90 wurde auf den VO 2 -Teil des Rezeptors und auf den gesamten Rezeptor angewendet, der VO 2 und einen Metall-Isolator-Metall-Stapel ( 6a ) enthielt .
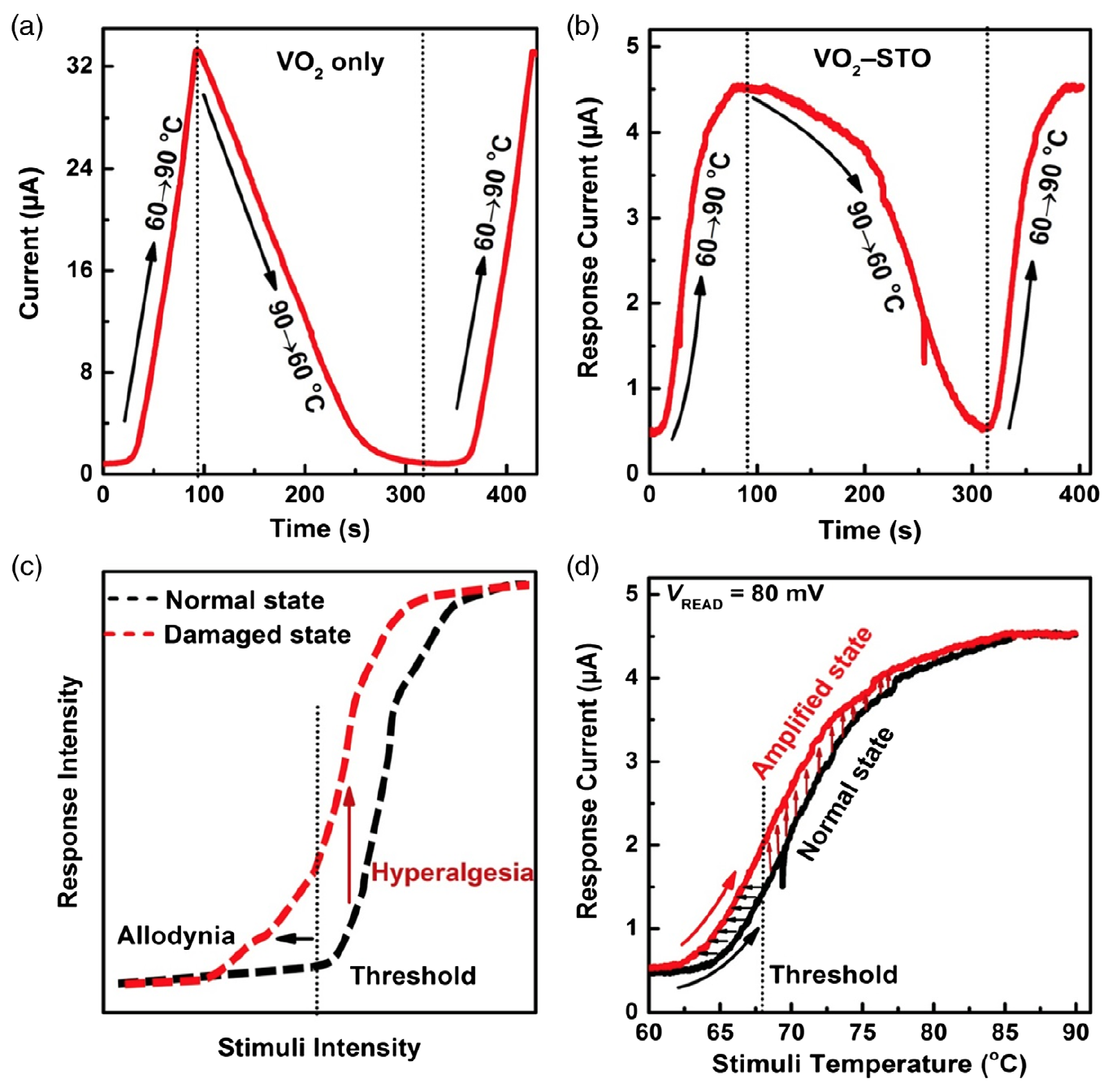
Bild Nr. 6
Die Grafiken zeigen deutlich, dass das Antwortsignal im VO 2 ( 6a ) viel linearer ist als das Signal nur Nozizeptor ( 6b ). Dies ist zu erwarten, da sich VO 2 bei hoher Reizintensität nach dem Übergang in einem nahezu metallischen Zustand mit einem relativ geringen Widerstand von 5 kOhm befindet. Darüber hinaus stellt die angelegte VREAD-Vorspannung (80 mV) die Spannung VO 2 elektrisch ein , um sie noch metallischer zu machen, was zu einer linearen Reaktion führt.
Wenn gleichzeitig eine ähnliche V READ- Vorspannung über den gesamten Nozizeptor auftritt, tritt der maximale Spannungsabfall über dem Memristor auf, der sich im LRS-Zustand (9 kΩ) befindet. In diesem Stadium ist die Spannung über VO2 reicht nicht aus, um eine lineare Antwort zu zeigen. Daher ist dieses Verhalten nicht linear.
Figur 6c zeigt das Verhalten in Allodynie und Hyperalgesie. In einem biologischen System ist die Antwortintensität in einem abnormalen Zustand für die Stimulusintensität unterhalb der Schwelle (Allodynie) und oberhalb der Schwelle (Hyperalgesie) höher.
Ein 6d zeigt eine Reaktion in Bezug auf zwei Zyklen von Heizsequenzen mit der Sequenz von 60 → 90 → 60 → 90 ° C. Hier sehen Sie, dass die Reaktion für den zweiten Heizzyklus erhöht und der Schwellenwert verringert wird.
Das Verhalten des künstlichen Rezeptors zeigt deutlich Allodynie unterhalb der Schwellenintensität und Hyperalgesie oberhalb der Schwellenintensität (70 ° C). Daraus folgt, dass der Nozizeptor durch Absenken der Schwelle und Erhöhen der Intensität der Reaktion Abwehrreaktionen wie das Zurückziehen oder Vermeiden akuter schmerzhafter Reize aktiviert und verstärkt.
Demonstration des Funktionsprinzips des elektronischen Äquivalents von Pacinis kleinem Körper.
Um die Nuancen der Studie genauer kennenzulernen, empfehle ich Ihnen, den Bericht von Wissenschaftlern und zusätzliche Materialien zu lesen.
Epilog
Das menschliche Gehirn ist eines der komplexesten biologischen Systeme. Man kann jedoch nicht leugnen, dass die menschliche Haut nicht weniger komplex ist, insbesondere angesichts der umfangreichen Liste von Funktionen, die sie erfüllt.
Es ist nicht schwierig, einige Funktionen der Haut in einem künstlichen Äquivalent wiederherzustellen, aber in Bezug auf Rezeptoren, die Informationen über die Umwelt sammeln, funktioniert dies sozusagen nicht.
Wissenschaftler haben es jedoch immer noch geschafft, einige Ergebnisse bei der Schaffung künstlicher Rezeptoren zu erzielen, die Druck, Temperatur und Schmerz erfassen.
Laut den Autoren dieser Arbeit kann ihr Gerät zwischen einer leichten Berührung und beispielsweise einem Nadelstich unterscheiden. Auf den ersten Blick sind dies sehr alltägliche Dinge, aber bisher war eine solche Genauigkeit bei elektronischen Rezeptoren nicht vorhanden.
In Zukunft beabsichtigen Wissenschaftler natürlich, ihre Arbeit fortzusetzen, um den Bereich der wahrgenommenen externen Reize zu erweitern, wodurch ihr Gerät noch genauer wird. Solche Entwicklungen werden definitiv nicht nur in der Prothetik, sondern auch in der Robotik Anwendung finden.
Vielen Dank für Ihre Aufmerksamkeit, bleiben Sie neugierig und haben Sie ein schönes Wochenende, Jungs! :) :)
Ein bisschen Werbung
Vielen Dank für Ihren Aufenthalt bei uns. Gefällt dir unser Artikel? Möchten Sie weitere interessante Inhalte sehen? Unterstützen Sie uns, indem Sie eine Bestellung aufgeben oder Freunden Cloud-VPS für Entwickler ab 4,99 US-Dollar empfehlen , ein einzigartiges Analogon von Einstiegsservern, die wir für Sie erfunden haben: Die ganze Wahrheit über VPS (KVM) E5-2697 v3 (6 Kerne) 10 GB DDR4 480 GB SSD 1 Gbit / s ab 19 $ oder wie teilt man den Server richtig? (Optionen verfügbar mit RAID1 und RAID10, bis zu 24 Kernen und bis zu 40 GB DDR4).
Ist Dell R730xd 2x im Equinix Tier IV-Rechenzentrum in Amsterdam billiger? Nur wir haben 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2,6 GHz 14C 64 GB DDR4 4 x 960 GB SSD 1 Gbit / s 100 TV von 199 US-Dollar in den Niederlanden!Dell R420 - 2x E5-2430 2,2 GHz 6C 128 GB DDR3 2x960 GB SSD 1 Gbit / s 100 TB - Ab 99 US-Dollar! Lesen Sie, wie Sie die Infrastruktur von bldg aufbauen. Klasse mit Dell R730xd E5-2650 v4 Servern zum Preis von 9000 Euro für einen Cent?