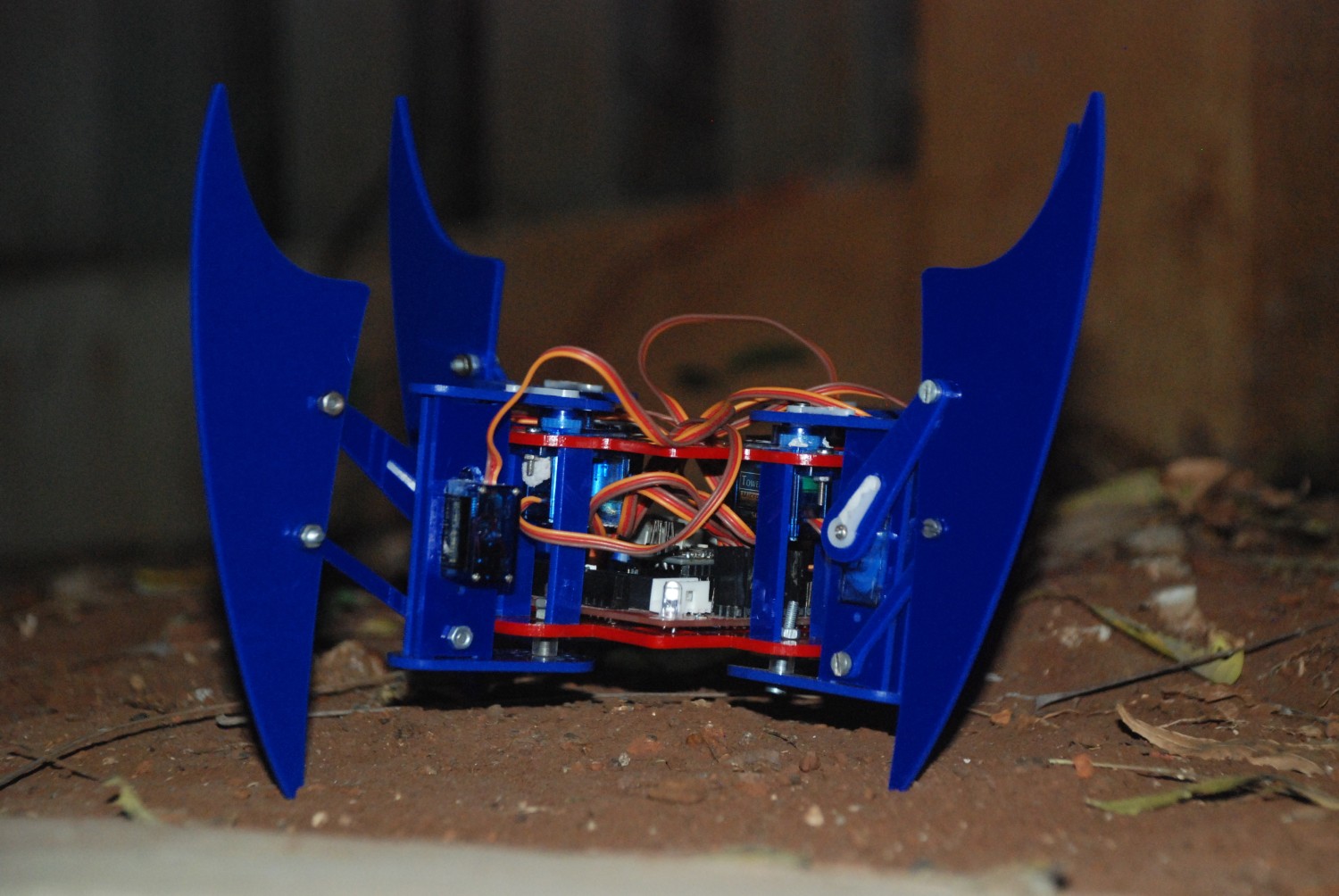
Miles ist ein auf Arduino Nano basierender Spinnenroboter , der 4 Beine zum Gehen und Manövrieren verwendet. 8 SG90 / MG90-Servomotoren werden als Beinantriebe verwendet. Mit einem speziell angefertigten Board können Sie die Motoren und den Arduino Nano steuern und antreiben. Das Board verfügt über spezielle Steckplätze für IMU-Module, Bluetooth und einen Infrarotsensor, der dem Roboter Autonomie verleiht. Der Körper besteht aus 2 mm dickem Plexiglas, das mit einem Laserschneider geschnitten wurde, kann aber auch mit einem 3D-Drucker gedruckt werden. Ein ausgezeichnetes Projekt für Enthusiasten, die etwas über inverse Kinematik in der Robotik lernen .
Inspiriert vom mePed-Projekt (www.meped.io) und verwendet darauf basierenden Code.


Materialien
Komponenten:
- Gebühr (1)
- Miles Komponenten für die Karosseriemontage.
- SG90 / MG90 Servomotoren (12)
- Aduino Nano (1)
- Spannungsregler LM7805 (6)
- Schalter (1)
- 0,33 uF Elektrolytkondensator (2)
- 0,1 uF Elektrolytkondensator (1)
- 3,08 mm 2-poliger Phoenix-Stecker (1)
- Stecker für Servomotoren.
Optional:
- 2-poliger Stecker Relimate (1)
- 10-poliger Relimate-Stecker (1)
- 4 im Stecker Relimate (1)
Schritt 1: Schaltplan- und

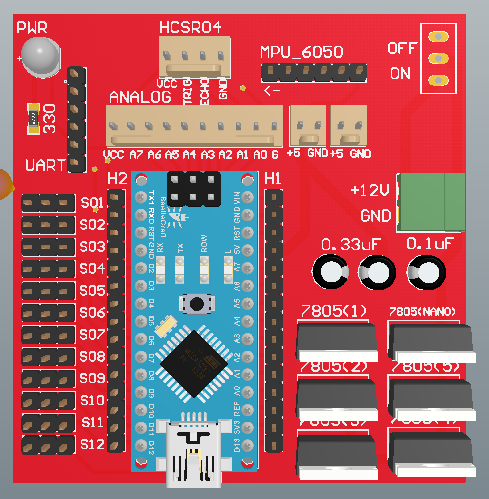

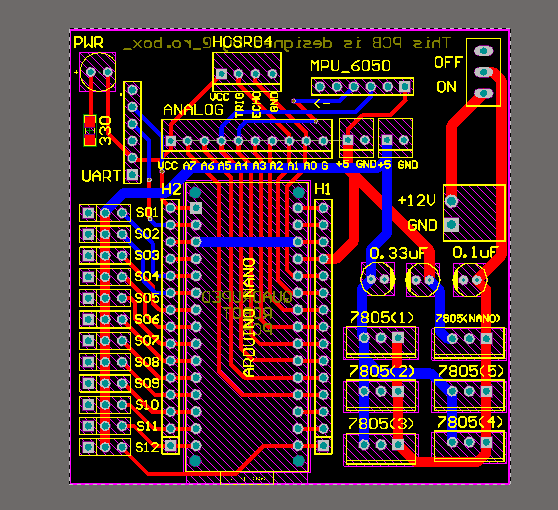
Board-Design Ich entwerfe meine Boards in Altium . 12 SG90 / MG90-Servomotoren können bei gleichzeitigem Betrieb bis zu 4-5 A verbrauchen, daher muss der Stromkreis in der Lage sein, hohe Ströme zu verarbeiten. Ich habe 7805-Spannungsregler verwendet, um die Motoren mit Strom zu versorgen. Jeder von ihnen kann jedoch maximal 1 A liefern. Deshalb habe ich 6 LM7805 parallel geschaltet, um den verfügbaren Ausgangsstrom zu erhöhen.
Laden Sie Schemata und Gerber-Dateien über den Link herunter .
Merkmale des Schemas:
- MPU6050 / 9250 werden zum Messen von Winkeln verwendet.
- Ausgangsstrom bis 6 A.
- Isolierte Stromversorgung für Servomotoren.
- Ausgang für Ultraschallsensor HCsr04.
- Es gibt Peripheriegeräte für Bluetooth und I2C /
- Relimate verfügt über alle analogen Kontakte für Sensoren und Aktoren.
- Ausgänge von 12 Servomotoren.
- Anzeige-LED.
Eigenschaften der Platine:
- 77 × 94 mm.
- 2 Schichten FR4.
- 1,6 mm.
Schritt 2: Löten der Komponenten und Laden des Codes

Löten Sie Komponenten, wenn sie wachsen, und beginnen Sie mit Aufputzgeräten.
In meiner Schaltung gibt es nur einen TMP-Widerstand. Fügen Sie dem Arduino und dem LM7805 weibliche Stifte hinzu, damit sie nach Bedarf ausgetauscht werden können. Löten Sie die Stecknadeln an die Motoranschlüsse.
Die Schaltung verwendet eine 5-V-Versorgung, die für die Motoren und den Arduino getrennt ist. Überprüfen Sie alle Stromschienen auf Erdschluss - Arduino 5V-Ausgang, VCC-Motorausgang und 12V Phoenix-Eingang.
Nachdem Sie das Board überprüft haben, können Sie das Arduino programmieren. Ich habe den Testcode auf Github gepostet . Füllen Sie es auf und bauen Sie den Roboter zusammen.
Schritt 3: Zusammenbau des Gehäuses

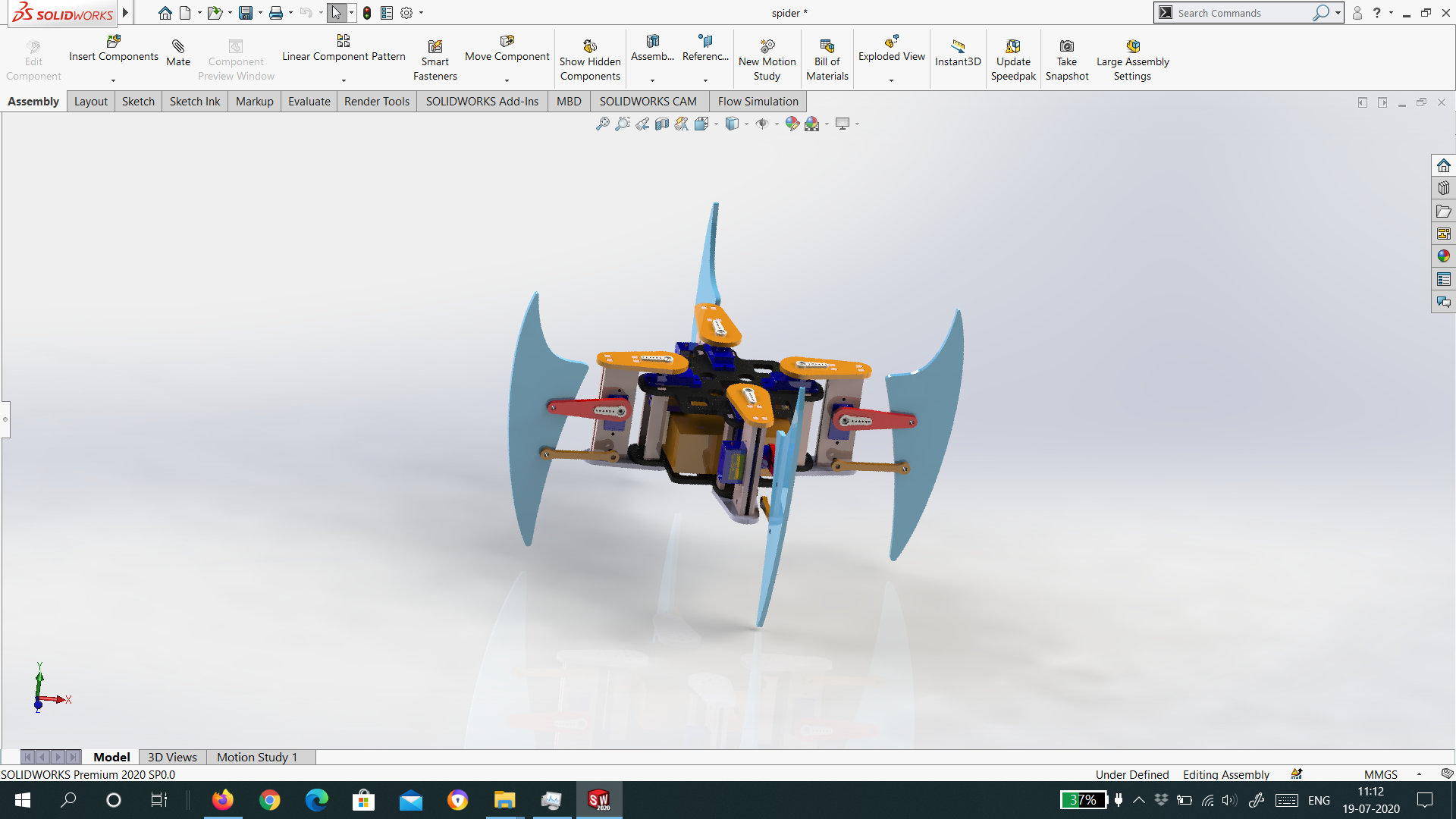
Insgesamt besteht der Roboter aus 26 Teilen, die auf einem 3D-Drucker gedruckt oder aus 2 mm Plexiglas geschnitten werden können. Ich habe 2 mm rote und blaue Plexiglasplatten verwendet, damit der Roboter wie Spiderman aussieht.
Im Gehäuse befinden sich mehrere Anschlüsse, die mit den Schrauben und Muttern M2 und M3 gesichert werden können. Servomotoren werden mit M2-Schrauben befestigt. Legen Sie Batterien und Platine ein, bevor Sie die Abdeckung aufschrauben.
Ich habe die notwendigen Dateien auf Github gepostet .
Schritt 4: Verbinden und testen
Verbinden Sie in der folgenden Reihenfolge:
- Schwenkmotor vorne links.
- Hubmotor vorne links.
- Schwenkmotor hinten links.
- Hubmotor hinten links.
- Schwenkmotor hinten rechts.
- Hinterer rechter Hubmotor.
- Schwenkmotor vorne rechts.
- Hubmotor vorne rechts.
Starten Sie den Roboter, indem Sie den Schalter schieben.
Schritt 5: zukünftige Verbesserungen
Inverse Kinematik
Der aktuelle Code verwendet einen Positionsansatz - wir legen die Winkel fest, um die sich die Motoren drehen müssen, um eine bestimmte Bewegung auszuführen. Inverse Kinematik gibt dem Roboter einen anspruchsvolleren Gang.
Bluetooth-Steuerung
Über den UART-Anschluss auf der Karte können Sie ein Bluetooth-Modul, z. B. HC-05, anschließen, um den Roboter drahtlos von einem Smartphone aus zu steuern.