Bei der Durchführung wissenschaftlicher und angewandter Forschung werden häufig Modelle erstellt, in denen Punkte und / oder Vektoren bestimmter Räume berücksichtigt werden. Beispielsweise verwenden elliptische Kurvenverschlüsselungsmodelle affine und projektive Räume. Projektive werden verwendet, wenn Berechnungen beschleunigt werden müssen, da in den Formeln zur Manipulation der Punkte einer elliptischen Kurve, die im Rahmen des projektiven Raums abgeleitet wurden, keine Division durch eine Koordinate erfolgt, die im Fall eines affinen Raums nicht umgangen werden kann .
Die Teilungsoperation ist nur eine der "teuersten" Operationen. Tatsache ist, dass es in algebraischen Feldern und dementsprechend in Gruppen überhaupt keine Divisionsoperation gibt und der Ausweg (wenn es unmöglich ist, nicht zu dividieren) darin besteht, dass die Divisionsoperation durch Multiplikation ersetzt wird, aber nicht durch die Koordinate selbst, sondern durch ihren inversen Wert multipliziert wird ... Daraus folgt, dass man zuerst den erweiterten euklidischen GCD-Algorithmus und etwas anderes einbeziehen muss. Kurz gesagt, nicht alles ist so einfach wie von den Autoren der meisten Veröffentlichungen über das ECC dargestellt. Fast alles, was zu diesem Thema und nicht nur im Internet veröffentlicht wurde, ist mir bekannt. Die Autoren sind nicht nur nicht kompetent und in der Obszönität engagiert, die Bewerter dieser Veröffentlichungen fügen Autoren in die Kommentare ein, das heißt, sie sehen weder Lücken noch offensichtliche Fehler. Über einen normalen Artikel schreiben sie, dass es bereits der 100500ste ist und keine Wirkung hat.So ist alles auf Habré angeordnet, die Analyse der Veröffentlichungen ist riesig, aber nicht die Qualität des Inhalts. Hier gibt es nichts zu beanstanden - Werbung ist der Motor des Geschäfts.
Linearer Vektorraum
Das Studium und die Beschreibung der Phänomene der umgebenden Welt führen uns notwendigerweise zur Einführung und Verwendung einer Reihe von Konzepten wie Punkten, Zahlen, Räumen, geraden Linien, Ebenen, Koordinatensystemen, Vektoren, Mengen usw.
Sei r <3>= <r1, r2, r3> Vektor des dreidimensionalen Raums, gibt die Position eines Teilchens (Punktes) relativ zum Ursprung an. Wenn wir N Elemente betrachten, müssen für die Beschreibung ihrer Position 3 ∙ N Koordinaten angegeben werden, die als Koordinaten eines Vektors im 3N-dimensionalen Raum betrachtet werden können. Wenn wir kontinuierliche Funktionen und ihre Sammlungen betrachten, kommen wir zu Räumen, deren Dimension gleich unendlich ist. In der Praxis beschränken sie sich häufig darauf, nur den Unterraum eines solchen unendlichdimensionalen Koordinatenfunktionsraums zu verwenden, der eine endliche Anzahl von Dimensionen aufweist.
Beispiel 1 . Die Fourier-Reihe ist ein Beispiel für die Verwendung des Funktionsraums. Betrachten Sie die Erweiterung einer beliebigen Funktion in einer Fourier-Reihe
Es kann als Erweiterung des "Vektors" f (x) in eine unendliche Menge von "orthogonalen" Basisvektoren sinnx interpretiert werden.
Dies ist ein Beispiel für die Abstraktion und Erweiterung des Konzepts eines Vektors auf eine unendliche Anzahl von Dimensionen. In der Tat ist bekannt, dass für -π ≤ x ≤ π

Die Essenz weiterer Überlegungen wird nicht leiden, wenn wir von der Dimension des abstrakten Vektorraums abstrahieren - sei es 3, 3N oder unendlich, obwohl für praktische Anwendungen endlich dimensionale Felder und Vektorräume von größerem Interesse sind.
Eine Menge von Vektoren r1, r2, ... wird als linearer Vektorraum L bezeichnet, wenn die Summe von zwei seiner Elemente ebenfalls in dieser Menge enthalten ist und wenn das Ergebnis der Multiplikation eines Elements mit einer Zahl C ebenfalls in dieser Menge enthalten ist. Nehmen wir gleich vor, dass die Werte der Zahl C aus einem genau definierten Zahlensatz F ausgewählt werden können - dem Feld der Reste modulo einer Primzahl p, die als an L gebunden gilt.
Beispiel 2 . Ein Satz von 8 Vektoren, bestehend aus n = 5-Bit-Binärzahlen
r0 = 00000, r1 = 10101, r2 = 01111, r3 = 11010, r4 = 00101, r5 = 10110, r6 = 01001, r7 = 11100 bildet den Vektorraum L, wenn die Zahlen C є {0,1} sind. In diesem kleinen Beispiel können Sie die Manifestation der Eigenschaften eines in seiner Definition enthaltenen Vektorraums überprüfen.
Die Summierung dieser Vektoren wird bitweise modulo zwei durchgeführt, dh ohne diejenigen auf das höchstwertige Bit zu übertragen. Beachten Sie, dass der Vektorraum als real bezeichnet wird, wenn alle C reell sind (im allgemeinen Fall gehört C zum Feld komplexer Zahlen).
Formal sind die Axiome des Vektorraums wie folgt geschrieben:
r1 + r2 = r2 + r1 = r3; r1, r2, r3 є L - Additionskommutativität und -schließung;
(r1 + r2) + r3 = r1 + (r2 + r3) = r1 + r2 + r3 - Assoziationsassoziativität;
ri + r0 = r0 + ri = ri; ∀i, ri, r0 є L - Existenz eines neutralen Elements;
ri + (- ri) = r0, für ∀i gibt es einen entgegengesetzten Vektor (-ri) є L;
1 ∙ ri = ri ∙ 1 = ri Existenz einer Einheit zur Multiplikation;
α (β ∙ ri) = (α ∙ β) ∙ ri; α, β, 1, 0 sind Elemente des Zahlenfeldes F, ri є L; Die Multiplikation mit Skalaren ist assoziativ. das Ergebnis der Multiplikation gehört zu L;
(α + β) ri = α ∙ ri + β ∙ ri; für ∀i sind ri є L, α, β Skalare;
a (ri + rj) = ari + arj für alle a, ri, rj є L;
a ≤ 0 = 0, 0 ≤ ri = 0; (-1) ∙ ri = - ri.
Dimension und Basis des Vektorraums
Bei der Untersuchung von Vektorräumen ist es von Interesse, Fragen wie die Anzahl der Vektoren, die den gesamten Raum bilden, zu klären. Was ist die Dimension des Raumes? Was ist der kleinste Satz von Vektoren, der durch Anwenden der Operation der Summierung und Multiplikation mit einer Zahl die Bildung aller Vektoren des Raums ermöglicht? Diese Fragen sind grundlegend und können nicht ignoriert werden, da ohne Antworten auf sie die Klarheit der Wahrnehmung von allem anderen, was die Theorie der Vektorräume ausmacht, verloren geht.
Es stellte sich heraus, dass die Dimension des Raums eng mit der linearen Abhängigkeit von Vektoren und der Anzahl linear unabhängiger Vektoren zusammenhängt, die in dem untersuchten Raum auf vielfältige Weise ausgewählt werden können.
Lineare Unabhängigkeit von Vektoren
Eine Menge von Vektoren r1, r2, r3 ... r von L heißt linear unabhängig, wenn für sie die Beziehung
ist nur unter der Bedingung der gleichzeitigen Gleichheit erfüllt ...
Alle, k = 1 (1) p, gehören zum Zahlenfeld der Reste modulo zwei
F = {0, 1}.
Wenn in einem Vektorraum L eine Menge von p Vektoren gewählt werden kann, für die die Beziehung besteht ausgeführt wird, sofern nicht alle gleichzeitig, d.h. Es stellte sich heraus, dass es möglich war, das Set auszuwählen, k = 1 (1) , unter denen es solche ungleich Null gibt, dann solche Vektoren werden linear abhängig genannt.
Beispiel 3 . Zwei Vektoren in der Ebene= <0, 1> T und= <1, 0> T sind linear unabhängig, da in der Beziehung (T-Transposition)
Es ist unmöglich, ein Zahlenpaar aufzunehmen Koeffizienten ungleich Null gleichzeitig, damit das Verhältnis erfüllt wird
Drei Vektoren= <0, 1> T ,= <1, 0> T ,= <1, 1> T bilden ein System linear abhängiger Vektoren, da in der Beziehung

Gleichheit kann durch Auswahl der Koeffizienten sichergestellt werden ungleich Null gleichzeitig. Darüber hinaus ist der Vektor ist eine Funktion und (ihre Summe), die die Abhängigkeit anzeigt von und ... Der Beweis für den allgemeinen Fall ist wie folgt.
Lassen Sie mindestens einen der Wertek = 1 (1) p, zum Beispiel und die Beziehung ist erfüllt. Dies bedeutet, dass Vektoren, k = 1 (1) , sind linear abhängig
Lassen Sie uns den Vektor r explizit trennen

Der Vektor r p soll eine lineare Kombination von Vektoren seinoder r p durch die verbleibenden Vektoren wird linear ausgedrückt, d.h. r p hängt linear von den anderen ab. Er ist ihre Funktion.
Auf einer zweidimensionalen Ebene sind drei beliebige Vektoren linear abhängig, aber zwei beliebige nicht kollineare Vektoren sind unabhängig. Im 3D-Raum sind drei beliebige nicht koplanare Vektoren linear unabhängig, aber vier beliebige Vektoren sind immer linear abhängig.
Abhängigkeit / Unabhängigkeit der Bevölkerung} Vektoren werden häufig durch Berechnung der Determinante der Gram-Matrix bestimmt (ihre Zeilen sind die Punktprodukte unserer Vektoren). Wenn die Determinante Null ist, gibt es abhängige Vektoren unter den Vektoren, wenn die Determinante ungleich Null ist, sind die Vektoren in der Matrix unabhängig.
Die Gram-Determinante (Gramian) des Vektorsystems
im euklidischen Raum heißt die Determinante der Gram-Matrix dieses Systems:
Wo - Punktprodukt von Vektoren
und ...
Dimension und Basis eines Vektorraums
Die Dimension s = d (L) eines Raums L ist definiert als die größte Anzahl von Vektoren in L, die eine linear unabhängige Menge bilden. Die Dimension ist nicht die Anzahl der Vektoren in L, die unendlich sein können, und nicht die Anzahl der Vektorkomponenten.
Räume endlicher Dimension s ≠ ≠ werden als endlichdimensional bezeichnet, wenn
s = ∞, unendlichdimensional.
Die Antwort auf die Frage nach der Mindestanzahl und Zusammensetzung von Vektoren, die die Erzeugung aller Vektoren in einem linearen Vektorraum sicherstellen, lautet die folgende Aussage.
Jede Sammlung von s linear unabhängiger Vektoren im Raum L bildet ihre Basen und s. Dies folgt aus der Tatsache, dass jeder VektorDer lineare s-dimensionale Vektorraum L kann auf einzigartige Weise als lineare Kombination von Basisvektoren dargestellt werden.
Wir fixieren und kennzeichnen mit dem Symbol, i = 1 (1) s, ist eines der Tupel, die eine Basis des Raumes L bilden. Dann
Die Zahlen r ki , i = 1 (1) s werden als Koordinaten des Vektors bezeichnet in der Basis i = 1 (1) s und r ki = (, ).
Lassen Sie uns die Einzigartigkeit der Darstellung zeigen... Offensichtlich das Set, ist abhängig, da , i = 1 (1) s ist eine Basis. Mit anderen Worten, es gibt solche nicht gleichzeitig gleich Null, die ...
Darüber hinaus lassenweil wenn , dann mindestens einer von wäre es ungleich Null und dann Vektoren i = 1 (1) s wäre linear abhängig, was unmöglich ist, da dies eine Basis ist. Folglich,


Mit der Methode der proof „durch Widerspruch“, gehen wir davon aus, dass die schriftliche Darstellungnicht der einzige auf dieser Basis und es gibt noch etwas anderes

Dann schreiben wir den Unterschied der Darstellungen auf, der natürlich ausgedrückt wird als

Offensichtlich sind die rechte und die linke Seite gleich, aber die linke Seite repräsentiert den Unterschied des Vektors mit sich selbst, das heißt, er ist gleich Null. Folglich ist auch die rechte Seite Null. Vektoren, i = 1 (1) s sind linear unabhängig, so dass alle Koeffizienten für sie nur Null sein können. Daraus bekommen wir das

und das ist nur möglich für

Die Wahl der Basis. Orthonormalität
Vektoren werden als normalisiert bezeichnet, wenn die Länge von jedem gleich eins ist. Dies kann erreicht werden, indem das Normalisierungsverfahren auf beliebige Vektoren angewendet wird.
Vektoren werden als orthogonal bezeichnet, wenn sie senkrecht zueinander stehen. Solche Vektoren können erhalten werden, indem auf jeden von ihnen ein Orthogonalisierungsverfahren angewendet wird. Wenn beide Eigenschaften für einen Satz von Vektoren erfüllt sind, werden die Vektoren als orthonormal bezeichnet.
Die Notwendigkeit, orthonormale Basen zu berücksichtigen, wird durch die Notwendigkeit verursacht, schnelle Transformationen sowohl ein- als auch mehrdimensionaler Funktionen zu verwenden. Die Aufgaben einer solchen Verarbeitung ergeben sich bei der Untersuchung von Codes, die Informationsnachrichten in Kommunikationsnetzen verschiedener Zwecke codieren, bei der Untersuchung der erhaltenen Bilder
durch automatische und automatisierte Geräte in einer Reihe anderer Bereiche unter Verwendung digitaler Darstellungen von Informationen.
Definition. Die Sammlung von n linear unabhängigen Vektoren eines n-dimensionalen Vektorraums
V wird als Basis bezeichnet.
Satz . Jeder Vektor x eines linearen n-dimensionalen Vektorraums V kann darüber hinaus auf einzigartige Weise in Form einer linearen Kombination von Basisvektoren dargestellt werden. Der Vektorraum V über dem Feld F hat die folgenden Eigenschaften:
0 x = 0 (0 auf der linken Seite der Gleichheit ist ein neutrales Element der additiven Gruppe des Feldes F; 0 auf der rechten Seite der Gleichheit ist ein Element des Raums V, der ein neutrales Einheitselement der additiven Gruppe V ist, das als Nullvektor bezeichnet wird );
(- 1) · x = –x; –1є F; x є V; –X є V;
Wenn α x = 0єV ist, dann ist für x ≠ 0 immer α = 0.
Sei Vn (F) die Menge aller Sequenzen (x1, x2, ..., xn) der Länge n mit Komponenten aus dem Feld F, d. H. Vn (F) = {x, so dass x = (x1, x2, ..., xn), xi є F;
i = 1 (1) n}.
Addition und Multiplikation mit einem Skalar sind wie folgt definiert:
x + y = (x1 + y1, x2 + y2,…, xn + yn);
α x = (α x1, α x2,…, α xn), wobei y = (y1, y2,…, yn),
dann ist Vn (F) ein Vektorraum über dem Feld F.
Beispiel 4 . Im Vektorraum r = 00000, r1 = 10101, r2 = 11010, r3 = 10101 über das Feld F2 = {0,1} bestimmen Sie dessen Dimension und Basis.
Entscheidung. Bilden wir eine Tabelle zur Addition von Vektoren eines linearen Vektorraums
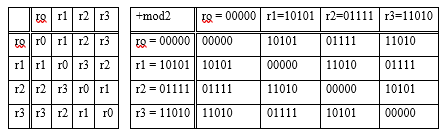
In diesem Vektorraum V = {ro, r1, r2, r3} hat jeder Vektor sein Gegenteil. Zwei beliebige Vektoren mit Ausnahme von r sind linear unabhängig, was leicht zu verifizieren ist:
c1 · r1 + c2 · r2 = 0; c1 r1 + c3 r3 = 0; c2 r2 + c3 r3 = 0;
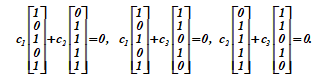
Jede der drei Beziehungen gilt nur für gleichzeitige Nullwerte der Koeffizientenpaare ci, cj є {0,1}.
Wenn drei Vektoren ungleich Null gleichzeitig betrachtet werden, ist einer von ihnen immer die Summe der beiden anderen oder ist gleich sich selbst und r1 + r2 + r3 = r.
Somit ist die Dimension des betrachteten linearen Vektorraums gleich zwei s = 2, d (L) = s = 2, obwohl jeder der Vektoren fünf Komponenten hat. Die Basis des Raumes ist die Sammlung (r1, r2). Sie können das Paar (r1, r3) als Basis verwenden.
Theoretisch und praktisch ist die Frage der Beschreibung des Vektorraums wichtig. Es stellt sich heraus, dass jeder Satz von Basisvektoren als Zeilen einer Matrix G angesehen werden kann, die als Erzeugungsmatrix des Vektorraums bezeichnet wird. Jeder Vektor dieses Raumes kann als lineare Kombination von Zeilen der Matrix G dargestellt werden ( wie zum Beispiel hier ).
Wenn die Dimension des Vektorraums gleich k ist und gleich der Anzahl der Zeilen der Matrix G, dem Rang der Matrix G, ist, dann gibt es offensichtlich k Koeffizienten mit q verschiedenen Werten zum Erzeugen aller möglichen linearen Kombinationen von Matrixzeilen. Darüber hinaus enthält der Vektorraum L q k Vektoren.
Die Menge aller Vektoren von ℤpn mit Operationen der Vektoraddition und Multiplikation eines Vektors mit einem Skalar von ℤp ist ein linearer Vektorraum.
Definition . Eine Teilmenge W eines Vektorraums V, der die Bedingungen erfüllt:
Wenn w1, w2 є W, dann w1 + w2 є W,
Für jedes α є F und w є W ist das Element αw є W
selbst ein Vektorraum über dem Feld F und wird als Unterraum des Vektorraums V bezeichnet.
Sei V ein Vektorraum über einem Feld F und eine Menge W ⊆ V. Die Menge W ist ein Unterraum des Raumes V, wenn W in Bezug auf die in V definierten linearen Operationen ein linearer Vektorraum ist.
Tabelle. Eigenschaften von Vektorräumen
Die Kompaktheit der Matrixdarstellung eines Vektorraums ist offensichtlich. Zum Beispiel erfordert die Angabe von L-Vektoren mit 50-Bit-Binärzahlen, von denen 30 Vektoren die Basis des Vektorraums bilden, die Bildung der Matrix G [30,50], und die beschriebene Anzahl von Vektoren überschreitet 10 9 , was in der elementweisen Notation unangemessen erscheint.
Alle Basen eines Raumes L werden durch die Untergruppe P nicht entarteter Matrizen mit det G> 0 in zwei Klassen unterteilt. Eine von ihnen wird (willkürlich) als Klasse mit positiv orientierten Basen (rechte) bezeichnet, die andere Klasse enthält linke Basen.
In diesem Fall heißt es, dass eine Orientierung im Raum gegeben ist. Danach ist jede Basis ein geordneter Satz von Vektoren.
Wenn die Nummerierung von zwei Vektoren in der rechten Basis geändert wird, wird die Basis links. Dies ist auf die Tatsache zurückzuführen, dass zwei Zeilen in der Matrix G vertauscht sind, daher ändert die Determinante detG das Vorzeichen.
Norm- und Punktprodukt von Vektoren
Nachdem wir die Fragen zum Finden der Basis eines linearen Vektorraums, zur Erzeugung aller Elemente dieses Raums und zur Darstellung eines Elements und des Vektorraums selbst durch die Basisvektoren gelöst haben, können wir das Problem aufwerfen, in diesem Raum die Abstände zwischen Elementen, Winkel zwischen Vektoren, Werte von Vektorkomponenten zu messen die Längen der Vektoren selbst.
Ein reeller oder komplexer Vektorraum L wird als normierter Vektorraum bezeichnet, wenn jeder Vektor r in ihm einer reellen Zahl || zugeordnet werden kann r || - Vektormodul, Norm. Ein Einheitsvektor ist ein Vektor, dessen Norm eins ist. Der Nullvektor hat Nullkomponenten.
Definition... Ein Vektorraum wird als einheitlich bezeichnet, wenn darin eine binäre Operation definiert ist, die jedem Paar ri, rj von Vektoren aus L einen Skalar zuweist. In Klammern (ri, rj) wird der Skalar oder das innere Produkt von ri und rj geschrieben (bezeichnet) und
1. (ri, rj) = ri ∙ rj;
2. (ri, rj) = (ri ∙ rj) *, wobei * komplexe Konjugation oder hermitische Symmetrie anzeigt;
3. (ri, rj) = (ri ∙ rj) - assoziatives Recht;
4. (ri + rj, rk) = (ri ∙ rk) + (rj ∙ rk) - Verteilungsgesetz;
5. (ri, rk) ≥ 0 und aus (ri, rj) = 0 folgt ri = 0.
Definition . Der positive Wert der Quadratwurzel
 wird als Norm (oder Länge, Modul) des Vektors ri bezeichnet. Wenn = 1, wird der Vektor ri als normalisiert bezeichnet...
wird als Norm (oder Länge, Modul) des Vektors ri bezeichnet. Wenn = 1, wird der Vektor ri als normalisiert bezeichnet...
Zwei Vektoren ri, rj des einheitlichen Vektorraums L sind zueinander orthogonal, wenn ihr Skalarprodukt gleich Null ist, d.h. (ri, rj) = 0.
Für s = 3 in einem linearen Vektorraum ist es zweckmäßig, drei zueinander senkrechte Vektoren als Basis zu wählen. Diese Auswahl vereinfacht eine Reihe von Abhängigkeiten und Berechnungen erheblich. Das gleiche Prinzip der Orthogonalität wird bei der Auswahl einer Basis in Räumen und anderen Dimensionen s> 3 verwendet. Die Verwendung der eingeführten Operation des Skalarprodukts von Vektoren bietet die Möglichkeit einer solchen Auswahl.
Noch größere Vorteile werden erzielt, wenn als Basis für den Vektorraum orthogonal normalisierter Vektoren die orthonormale Basis gewählt wird... Sofern nicht anders angegeben, werden wir im Folgenden immer annehmen, dass die Basis ei, i = 1 (1) s auf diese Weise gewählt wird, d.h.
In einheitlichen Vektorräumen ist diese Auswahl immer realisierbar. Lassen Sie uns die Machbarkeit einer solchen Wahl zeigen.
Definition. Sei S = {v1, v2,…, vn} eine endliche Teilmenge eines Vektorraums V über einem Feld F.
Eine lineare Kombination von Vektoren aus S ist ein Ausdruck der Form a1 ∙ v1 + a2 ∙ v2 +… + an ∙ vn, wobei jedes ai ∊ F.
Die Hüllkurve für eine Menge S (Notation {S}) ist die Menge aller linearen Kombinationen von Vektoren aus S. Die Hüllkurve für S ist ein Unterraum von V.
Wenn U ein Raum in V ist, wird U von S überspannt (S zieht U), wenn {S} = U.
Die Menge der Vektoren S ist linear abhängig von F, wenn F Skalare a1, a2, ... enthält, nicht alle Nullen, für die a1 ∙ v1 + a2 ∙ v2 +… + an ∙ vn = 0. Wenn es keine solchen Skalare gibt, dann ist die Menge von Vektoren S linear unabhängig über F.
Wenn ein Vektorraum V von einem linear unabhängigen System von Vektoren S überspannt wird (oder das System S den Raum V zusammenzieht), wird das System S als Basis für V bezeichnet.
Reduktion einer beliebigen Basis auf orthonormale Form
Der Raum V habe eine nicht orthonormale Basis ē i , i = 1 (1) s. Wir bezeichnen die Norm jedes Basisvektors mit dem Symbol

Das Verfahren zum Reduzieren der Basis auf eine orthonormalisierte Form basiert auf dem Gram-Schmidt-Orthogonalisierungsprozess, der wiederum durch wiederkehrende Formeln implementiert wird.

In erweiterter Form enthält der Basisorthogonalisierungs- und Normalisierungsalgorithmus die folgenden Bedingungen:
Teilen Sie den Vektor ē 1 durch seine Norm; wir erhalten den normalisierten Vektor ē i = ē 1 / (|| ē 1 ||);
Wir bilden V2 = ē 2 - (ē 1 , ē 2 ) e 1 und normalisieren es, wir erhalten e 2 . Es ist klar , dass dann
(e1, e2) ~ (e1, e2) - (e1, e 2 ) (e1, e1) = 0;
Wenn wir V3 = ē 3 - (e1, ē 3 ) e1 - (e2, ē 3 ) e2 konstruieren und normalisieren, erhalten wir e3.
Dafür haben wir sofort (e1, e3) = (e2, e3) = 0.
Wenn wir diesen Prozess fortsetzen, erhalten wir eine orthonormale Menge ē i , i = 1 (1) s. Diese Menge enthält linear unabhängige Vektoren, da sie alle zueinander orthogonal sind.
Stellen wir das sicher. Lass die Beziehung
Wenn die Menge ē i , i = 1 (1) s abhängig ist, dann ist mindestens ein cj-Koeffizient ungleich Null cj ≠ 0.
Multipliziert man beide Seiten des Verhältnisses mit ej, so erhält man
(ej, c1 ∙ e1) + (ej, c2 ∙ e2) + ... + (ej, cj ∙ ej) +… + (ej, cs ∙ rs) = 0.
Jeder Summand in der Summe ist gleich Null als Skalarprodukt orthogonaler Vektoren, mit Ausnahme von (ej, cj ∙ ej), das gleich Null ist Bedingung. Aber in diesem Term
(ej, ej) = 1 ≠ 0 kann daher nur cj Null sein.
Somit ist die Annahme, dass cj ≠ 0 nicht wahr ist und die Sammlung linear unabhängig ist.
Beispiel 5 . Eine Basis eines dreidimensionalen Vektorraums ist gegeben:
{<-1, 2, 3, 0>, <0, 1, 2, 1>, <2, -1, -1,1>}.
Das Punktprodukt wird durch die Beziehung definiert:
(<x1, x2, x3, x4>, <y1, y2, y3, y4>) = x1 ≤ y1 + x2 ≤ y2 + x3 ≤ y3 + x4 ≤ y4.
Unter Verwendung des Gram-Schmidt-Orthogonalisierungsverfahrens erhalten wir ein Vektorsystem:
a1 = <-1, 2, 3, 0>; a2 = <0, 1, 2, 1> -4 <-1, 2, 3,0> / 7 = <4, -1, 2, 7> / 7;
a3 = <2, -1, -1, 1> + ½ <-1, 2, 3, 0> - <4, -1, 2, 7> / 5 = <7, 2, 1, -4> / zehn.
(a1, a2) = (1 + 4 + 9 + 0) = 14;
a1 E = a1 / √14;
a2- (a1 E , a2) ∙ a1 E = a2- (8 / √14) (a1 / √14) = a2 - 4 ∙ a1 / 7;
Der Leser wird aufgefordert, den dritten Vektor unabhängig zu verarbeiten.
Die normalisierten Vektoren haben die Form:
a1 E = a1 / √14;
a2 E = <4, -1, 2, 7> / √70;
a3 E = <7, 2, 1, -4>/ √70;
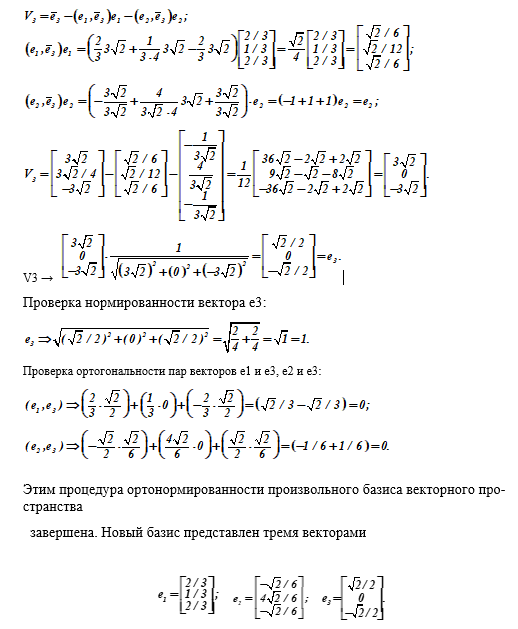
Im Folgenden wird in Beispiel 6 ein detaillierter detaillierter Prozess zur Berechnung der Ableitung einer orthonormalen Basis aus einer einfachen (zufällig genommenen) Basis angegeben.
Beispiel 6 . Reduzieren Sie die gegebene Basis des linearen Vektorraums auf orthonormale Form.
Gegeben: Basisvektoren
Teilräume von Vektorräumen
Vektorraumstruktur Die
Darstellung von Objekten (Körpern) in mehrdimensionalen Räumen ist eine sehr schwierige Aufgabe. Ein vierdimensionaler Würfel hat also gewöhnliche dreidimensionale Würfel als Flächen, und eine Entfaltung eines vierdimensionalen Würfels kann im dreidimensionalen Raum aufgebaut werden. In gewissem Maße tragen die "Bilder" und die Klarheit des Objekts oder seiner Teile zu seiner erfolgreicheren Untersuchung bei.
Das Vorstehende erlaubt es uns anzunehmen, dass Vektorräume auf irgendeine Weise zerlegt werden können, um Teile in ihnen herauszusuchen, die als Unterräume bezeichnet werden. Offensichtlich beraubt uns die Betrachtung mehrdimensionaler und insbesondere unendlichdimensionaler Räume und Objekte in ihnen der Klarheit von Darstellungen, was es sehr schwierig macht, Objekte in solchen zu untersuchen
Räume. Selbst scheinbar einfache Fragen wie die quantitativen Eigenschaften der Elemente von Polyedern (Anzahl der Eckpunkte, Kanten, Flächen usw.) in diesen Räumen sind bei weitem nicht vollständig gelöst.
Eine konstruktive Möglichkeit, solche Objekte zu untersuchen, besteht darin, ihre Elemente (z. B. Kanten, Flächen) auszuwählen und sie in Räumen niedrigerer Dimension zu beschreiben. Ein vierdimensionaler Würfel hat also gewöhnliche dreidimensionale Würfel als Flächen, und eine Entfaltung eines vierdimensionalen Würfels kann im dreidimensionalen Raum aufgebaut werden. In gewissem Maße tragen die
"Bilder" und die Klarheit des Objekts oder seiner Teile zu ihrer erfolgreicheren Untersuchung bei.
Wenn L eine Erweiterung des Feldes K ist, kann L als Vektorraum (oder linearer Raum) über K betrachtet werden. Die Elemente des Feldes L (dh Vektoren) bilden durch Addition eine abelsche Gruppe. Darüber hinaus kann jeder "Vektor" a є L mit einem "Skalar" r є K multipliziert werden, und das Produkt ra gehört wieder zu L (hier ist ra einfach das Produkt im Sinne der Operation des Feldes L der Elemente r und a dieses Feldes). Die Gesetze halten auch
r ∙ (a + b) = r ∙ a + r ∙ b, (r + s) ∙ a = r ∙ a + r ∙ s, (r ∙ s) ∙ a = r ∙ (s ∙ a) und 1 ∙ a = a, wobei r, s є K, a, b є L.
Das Vorstehende erlaubt es uns anzunehmen, dass Vektorräume auf irgendeine Weise zerlegt werden können, um Teile in ihnen herauszusuchen, die als Unterräume bezeichnet werden. Das Hauptergebnis dieses Ansatzes besteht offensichtlich darin, die Dimension der zugewiesenen Teilräume zu reduzieren. Die Teilräume L1 und L2 seien in einem vektorlinearen Raum L zu unterscheiden. Als Basis für L1 wird eine kleinere Menge ei, i = 1 (1) s1, s1 <s, als im ursprünglichen L gewählt.
Die verbleibenden Basisvektoren erzeugen einen weiteren Unterraum L2, der als "orthogonales Komplement" des Unterraums L1 bezeichnet wird. Wir werden die Notation L = L1 + L2 verwenden. Dies bedeutet nicht, dass alle Vektoren des Raums L entweder zu L1 oder L2 gehören, sondern dass jeder Vektor aus L als die Summe eines Vektors aus L1 und eines orthogonalen Vektors aus L2 dargestellt werden kann.
Es ist nicht die Menge von Vektoren des Vektorraums L, die geteilt wird, sondern die Dimension d (L) und die Menge von Basisvektoren. Somit ist der Unterraum L1 eines Vektorraums L die Menge L1 seiner Elemente (niedrigerer Dimension), die selbst ein Vektorraum in Bezug auf die Operationen der Addition und Multiplikation mit einer in L eingeführten Zahl ist.
Jeder lineare Vektorunterraum Li - enthält einen Nullvektor und enthält zusammen mit einem seiner Vektoren alle seine linearen Kombinationen. Die Dimension eines linearen Unterraums überschreitet nicht die Dimension des ursprünglichen Raums.
Beispiel 7.Im gewöhnlichen dreidimensionalen Raum sind Unterräume alle gerade Linien (Dimension s = 1), Ebenen (Dimension s = 2), die durch den Ursprung verlaufen. In dem Raum n von Polynomen mit einem Grad von höchstens n sind Teilräume beispielsweise alle k für k <n, da wir durch Addieren und Multiplizieren mit Zahlenpolynomen mit einem Grad von höchstens k wieder dieselben Polynome erhalten.
Jeder der Räume Pn ist jedoch als Teilräume im Raum P aller Polynome mit reellen Koeffizienten enthalten, und letzterer ist ein Unterraum des Raums C kontinuierlicher Funktionen.
Gleichartige Matrizen über dem Feld der reellen Zahlen bilden ebenfalls einen linearen Vektorraum, da sie alle Axiome der Vektorräume erfüllen. Der Vektorraum L2 von Sätzen der Länge n, von denen jeder orthogonal zum Unterraum L1 von Sätzen der Länge n ist, bildet einen Unterraum L2, der als Nullraum für L1 bezeichnet wird. Mit anderen Worten ist jeder Vektor von L2 orthogonal zu jedem Vektor von L1 und umgekehrt.
Beide Teilräume L1 und L2 sind Teilräume des Vektorraums L von Mengen der Länge n. In der Codierungstheorie [4] erzeugt jeder der Teilräume L1 und L2 einen linearen Code, der doppelt so groß ist wie der von anderen Teilräumen erzeugte Code. Wenn L1 ein (n, k) -Code ist, dann ist L2 ein (n, n - k) -Code. Wenn ein Code ein Vektorraum aus Zeilen einer Matrix ist, ist sein Doppelcode der Nullraum dieser Matrix und umgekehrt.
Ein wichtiges Thema bei der Untersuchung von Vektorräumen Vn ist die Festlegung ihrer Struktur (Struktur). Mit anderen Worten, von Interesse sind Elemente, ihre Sammlungen (Teilräume der Dimension 1 <k <n) sowie ihre Beziehungen (Reihenfolge, Verschachtelung usw.). Wir nehmen an, dass ein gegebener Vektorraum Vn über einem endlichen Feld GF (q) besteht, das durch q = p r Elemente gebildet wird, wobei p eine Primzahl und r eine ganze Zahl ist.
Die folgenden Ergebnisse sind bekannt.
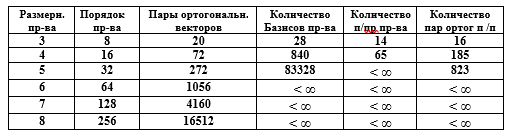
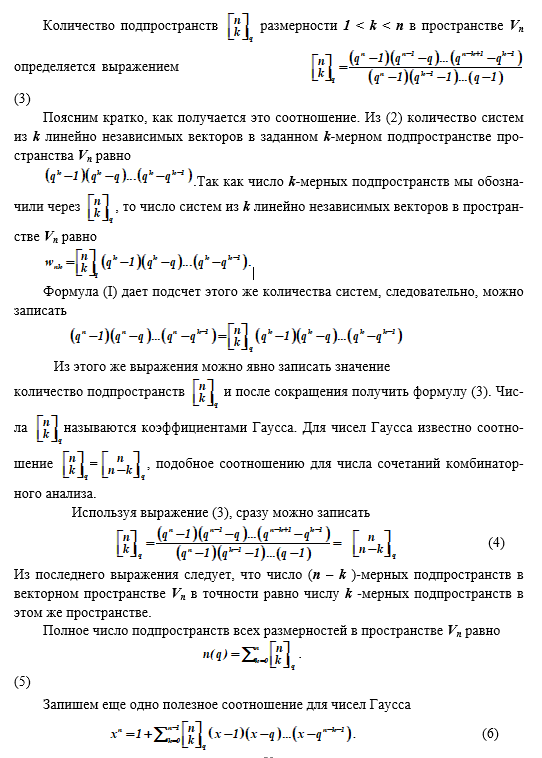
Die Anzahl der Teilräume eines Vektorraums

Lassen Sie uns die folgende Begründung geben. Jeder Vektor v1 ≠ 0 aus einem System von k linear unabhängigen (v1, v2,…, vk) Vektoren kann auf q n - 1 Arten ausgewählt werden. Der nächste Vektor v2 ≤ 0 kann nicht linear in Form von v1 ausgedrückt werden, d.h. kann auf q n - q Arten usw. gewählt werden.
Der letzte Vektor vk ≠ 0 wird auch nicht linear in Form der zuvor ausgewählten Vektoren v1, v2, ..., vk ausgedrückt und kann daher auf q n - q k - 1 Arten ausgewählt werden. Die Gesamtzahl der Möglichkeiten zur Auswahl eines Satzes von Vektoren v1, v2, ..., vk ist somit definiert als das Produkt der Anzahl der Auswahlen einzelner Vektoren, was die Formel (1) ergibt. Für den Fall, dass k = n ist, haben wir w = wn, n und aus Formel (I) erhalten wir Formel (2).
Wichtige verallgemeinernde Ergebnisse zu den Dimensionen von Teilräumen.
Die Sammlung aller Tupel der Länge n orthogonal zum Unterraum V1 der Tupel der Länge n bildet den Unterraum V2 der Tupel der Länge n. Dieser Unterraum V2 wird als Nullraum für V1 bezeichnet.
Wenn ein Vektor orthogonal zu jedem der Vektoren ist, die den Unterraum V1 erzeugen, dann gehört dieser Vektor zum Nullraum für V1.
Ein Beispiel für (V1) ist der Satz von 7-Bit-Vektoren der Erzeugungsmatrix des (7,4) Hamming-Codes mit einem Null-Unterraum (V2) von 7-Bit-Vektoren, die die Paritätsprüfungsmatrix dieses Codes bilden.
Wenn die Dimension des Unterraums (V1) von Mengen der Länge n gleich k ist, ist die Dimension des Null-Unterraums (V2) gleich n - k.
Wenn V2 ein Unterraum von Tupeln der Länge n ist und V1 ein Nullraum für V2 ist, dann ist (V2) ein Nullraum für V1.
Sei U∩V die Sammlung von Vektoren, die sowohl zu U als auch zu V gehören, dann ist U∩V ein Unterraum.
U⊕V bezeichne den Unterraum, der aus der Sammlung aller linearen Kombinationen der Form a u + b v besteht , wobei u є U, v є V, ab Zahlen sind.
Die Summe der Dimensionen der Teilräume U∩V und U⊕V ist gleich der Summe der Dimensionen der Teilräume U und V.
Sei U2 der Nullunterraum für U1 und V2 der Nullraum für V1. Dann ist U2∩V2 der Nullraum für U1⊕V1.
Fazit
Die Arbeit befasst sich mit den Grundkonzepten von Vektorräumen, die häufig bei der Konstruktion von Modellen zur Analyse von Verschlüsselungs-, Codierungs- und steganografischen Systemen verwendet werden, sowie von Prozessen, die in ihnen auftreten. Daher werden im neuen amerikanischen Verschlüsselungsstandard affine Räume und in digitalen Signaturen auf elliptischen Kurven sowohl affine als auch
projektive Räume verwendet (um die Verarbeitung von Kurvenpunkten zu beschleunigen).
Wir sprechen nicht über diese Räume in der Arbeit (man kann nicht alles zusammenfassen, und ich beschränke auch das Veröffentlichungsvolumen), aber die Erwähnungen davon sind nicht umsonst. Autoren, die über Schutzmittel, über Chiffrieralgorithmen schreiben, glauben naiv, die Details der beschriebenen Phänomene zu verstehen, aber das Verständnis der euklidischen Räume und ihrer Eigenschaften wird ohne Vorbehalte auf andere Räume mit unterschiedlichen Eigenschaften und Gesetzen übertragen. Das Lesepublikum wird über die Einfachheit und Zugänglichkeit des Materials in die Irre geführt.
Im Bereich der Informationssicherheit und der Spezialausrüstung (Technologie und Mathematik) entsteht ein falsches Bild der Realität.
Im Allgemeinen habe ich die Initiative ergriffen, wie glücklich die Leser sind, zu beurteilen.
Literatur
1. Avdoshin S.M., Nabebin A.A. Diskrete Mathematik. Modulare Algebra, Kryptographie, Codierung. - M.: DMK Press, 2017.-352 p.
2. Akimov O.E. Diskrete Mathematik. Logik, Gruppen, Graphen - M .: Lab. Base. Zn., 2001.-352 p.
3. Anderson D.A. Diskrete Mathematik und Kombinatorik), Moskau: Williams, 2003, 960 p.
4. Berlekamp E. Algebraische Codierungstheorie. -M.: Mir, 1971.- 478 p.
5. Vaulin A.E. Diskrete Mathematik bei Computersicherheitsproblemen. H 1- SPb .: VKA im. A.F. Mozhaisky, 2015.219 p.
6. Vaulin A.E. Diskrete Mathematik bei Computersicherheitsproblemen. H 2 -Spb .: VKA im. A.F. Mozhaisky, 2017.-151 p.
7. Gorenstein D. Endliche einfache Gruppen. Einführung in ihre Klassifikation.-M .: Mir, 1985.- 352 p.
7. Graham R., Knut D., Ptashnik O. Konkrete Mathematik. Grundlagen der Informatik.-M .: Mir, 1998.-703 p.
9. Elizarov V.P. Endringe. - M.: Helios ARV, 2006. - 304 p.
Ivanov B.N. Diskrete Mathematik: Algorithmen und Programme-M .: Lab.Baz. Knowledge., 2001.280 p.
10. Yerusalimsky Ya.M. Diskrete Mathematik: Theorie, Probleme, Anwendungen-M.: Vuzovskaya kniga, 2000.-280 p.
11. Korn G., Korn T. Handbuch der Mathematik für Wissenschaftler und Ingenieure.-M .: Nauka, 1973.-832 p.
12. Lidl R., Niederreiter G. Endliche Felder: In 2 Bänden. Vol. 1-M .: Mir, 1988. - 430 p.
13. Lidl R., Niederreiter G. Endliche Felder: In 2 Bänden. Vol. 2-M .: Mir, 1988. - 392 p.
14. Lyapin E. S., Aizenshtat A. Ya., Lesokhin M. M., Übungen zur Theorie der Gruppen. - Moskau: Nauka, 1967.-264 p.
15. Mutter V.M. Grundlagen der Anti-Jamming-Informationsübertragung. -L. Energoatomizdat, 1990, 288 p.
16. Nabebin A. A. Diskrete Mathematik .- M .: Lab. Base. Knowledge., 2001.280 p.
17. Novikov F.A. Diskrete Mathematik für Programmierer.- SPb .: Peter, 2000.-304 p.
18. Rosenfeld B.A. Mehrdimensionale Räume.-M .: Nauka, 1966.-648 p.
18. Halle M. Die Theorie der Gruppen.-M .: Izd. IL, 1962.- 468 p.
19. Shikhanovich Yu.A. Gruppen, Ringe, Gitter. - SPb.: Kirtsideli, 2006. - 368 p.
20. Shneperman LB Der Kurs der Algebra und Zahlentheorie in Problemen und Übungen: In 2 Stunden Teil 2.-Mn .: Vysh. shk., 1987.-256 p.
21. Shneperman LB Sammlung von Problemen in der Algebra und Zahlentheorie. - Minsk: Design PRO, 2000. -240 p.