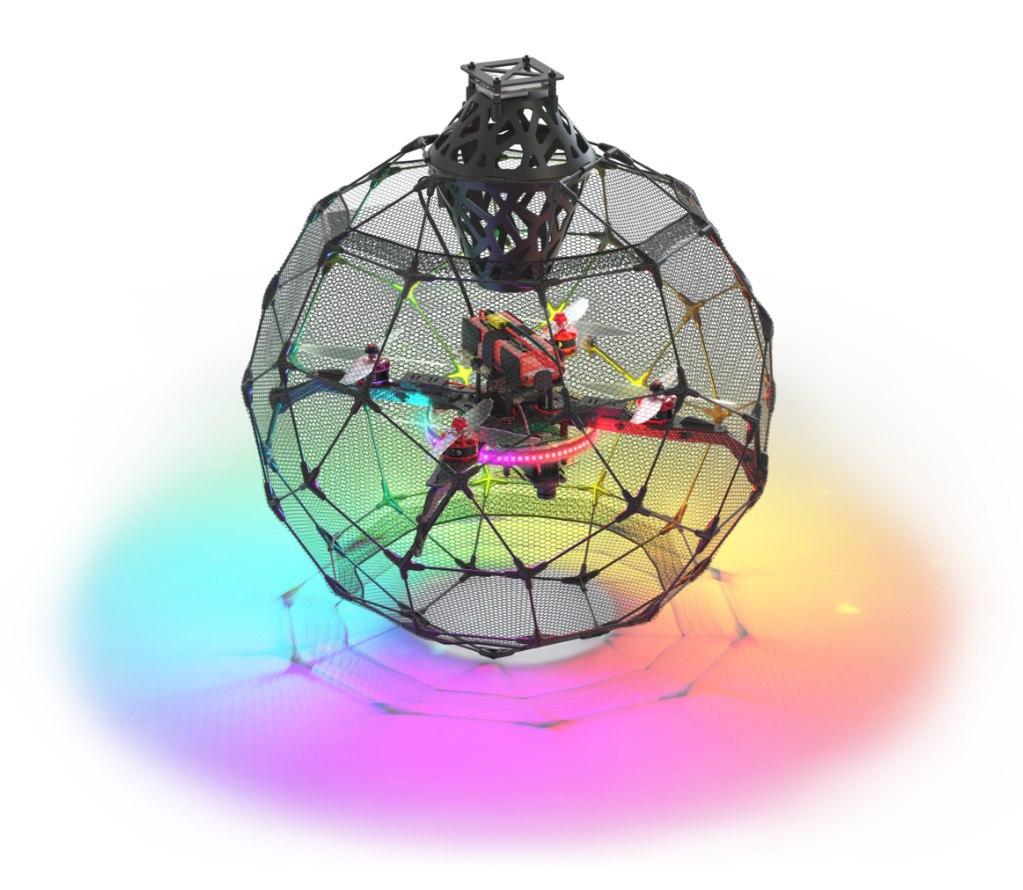
Sehr kontrovers, sehr ungewöhnlich, sehr seltsam, aber es funktioniert! An der Schnittstelle von Architektur, kollaborativer Robotik und unbemannten Luftfahrzeugen. Wir stellen vor: Tensodrone ™.

Tensodrone (Tensodron) - unbemanntes Luftfahrzeug (UAV) eines Mehrrotortyps in neuem Design mit Kollisionsschutz nach dem Prinzip der Tensegrity. Dieser Ansatz verbessert die Schlagfestigkeit bei geringerem Gewicht, indem der Schutzkäfig und das strukturelle Rahmendesign kombiniert werden.
Das Projekt ist ein anschauliches Beispiel für das Zusammenspiel verschiedener Teams des NTI Competence Center in Richtung "Technologies of Robotics and Mechatronics Components" auf Basis der Innopolis University.
Drohnen fallen

Quelle
Nur weil sie fliegen. Steuerungssysteme, Motoren, Sensoren, Autopiloten, Bordcomputer und Software - die Entwickler versuchen dies alles so zuverlässig wie möglich zu machen, aber das Risiko eines Absturzes des Copters bleibt bestehen. Und wenn dies ein Prototyp ist, müssen Sie sofort mehrere (Teile oder Dutzende?) Zum Debuggen erstellen. Neben internen Faktoren bleiben natürlich auch externe Faktoren übrig: Wind, passive Hindernisse, aktiver Einfluss.
Kaum jemand wird streiten, Drohnen fallen, kollidieren, kippen.
Sie können versuchen, dies zu vermeiden, Sie können sich darauf vorbereiten. Was ist besser? Es liegt an dem Entwickler, Benutzer und Gesetzgeber.
Ich bin dafür, beide Ansätze zusammen zu verwenden. In diesem Artikel konzentrieren wir uns jedoch darauf, wie die Folgen eines Sturzes oder einer Kollision eines UAV vermieden werden können.
Schutzstrukturen
Der einfachste Ansatz, um die Folgen eines Sturzes oder einer Kollision eines UAV zu vermeiden, ist ein Schutzkäfig und andere Schutzstrukturen. Hier gibt es zwei Aufgaben - den Schutz der Drohne vor Beschädigungen und den Schutz der Umgebung, in der die Drohne betrieben wird, und der Personen darin vor der Drohne.
Die Basisversion des Designs, die Menschen eher vor der Drohne schützt, ist der Propellerschutz.

AR.Drone 2.0 Drohne mit Propellerschutz. Quelle
Es gibt auch lustige Origami-inspirierte Lösungen mit faltbaren flexiblen Propellerschutzvorrichtungen (und sogar Rahmendesigns), die vom Team von Professor Dario Floreano an der EPFL entwickelt wurden.
Das vorherrschende Design zum Schutz der Drohne selbst (und gleichzeitig der Menschen davor) ist ein Schutzkäfig. Der Quadcopter selbst befindet sich im Käfig.
DrohneKlee aus der russischen COEX Die
russische Firma COEX stellt Drohnen für Schulungszwecke her, die standardmäßig über Propellerschutz und optional einen Schutzkäfig verfügen.
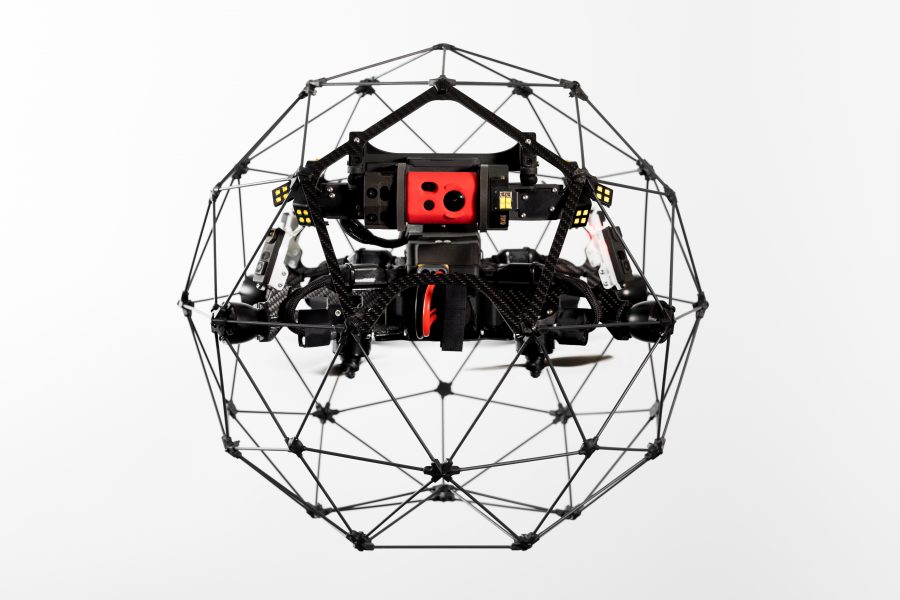
Flugfähigkeit von Drohnen ELIOS
Swiss (Schweiz - Hauptstadt dronostroeniya?) Flyability Company - produziert den vielleicht kommerziell erfolgreichsten Hubschrauber ELIOS mit einem Schutzkäfig für die Durchführung von Inspektionen innerhalb von Räumlichkeiten. Die Originalität des Designs besteht darin, den Schutzkäfig am Rahmen des Hubschraubers an einer beweglichen Aufhängung mit der Möglichkeit der Stabilisierung zu befestigen.

Drone Dronistics
Das Dronistics- Startup der EPFL (wieder Schweiz, von der Dario Floreano-Gruppe) bietet eine Drohne mit faltbarem Käfig für die sichere Lieferung von Waren an.
Immer noch Pause

Der Nachteil solcher Drohnen ist die Zunahme der Masse der Struktur - Sie müssen einen Schutzkäfig und Zubehörteile am UAV tragen. Der Wunsch, das Gewicht der Schutzstruktur zu reduzieren, führt zu einer Abnahme ihrer Festigkeit.
Drohnen mit variabler Geometrie
Eine andere Richtung, die mit der Idee einer robusten Drohne verbunden ist (und nicht nur), ist das Falten von Drohnen und Drohnen mit variabler Geometrie (faltbar und verwandelnd). Dies bezieht sich auf die Fähigkeit der Drohne, ihre Geometrie im Flug zu ändern. Faltbare Strukturen werden hergestellt, um eine Beschädigung der Drohne zu vermeiden (zum Beispiel kann die Drohne vor dem Aufprall "zusammenzucken"), und die Drohne kann zum Beispiel für den Flug durch enge Fenster auf eine kompakte Größe gefaltet werden.
Vielleicht haben Sie ein cooles Video einer Drohne mit variabler Geometrie aus der Schweiz gesehen (ja, wieder ETH + EPFL + UZH). Diese Idee ist auch interessant und nah bei uns, ich werde Ihnen später sagen, warum.
Drohne mit variabler Geometrie
Tensegrity
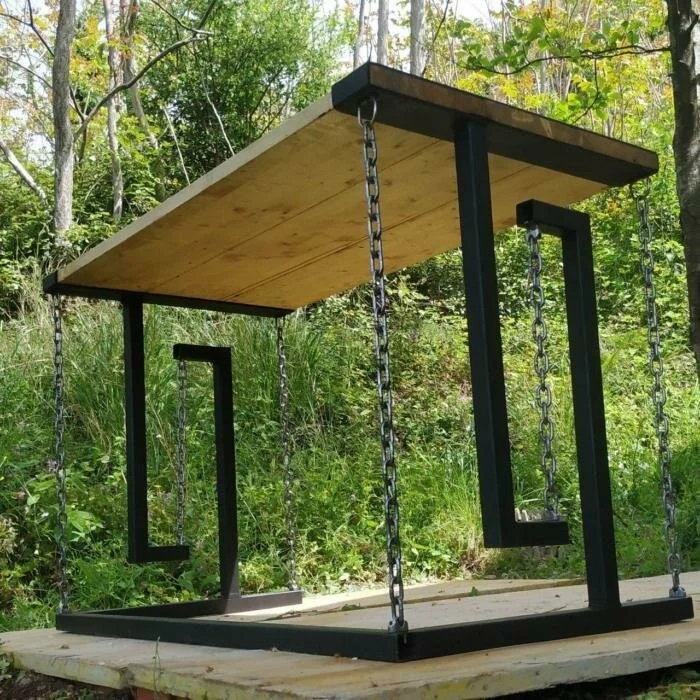
Tensegrity-Tisch. Die Quelle von
Tensegrity ist die Fähigkeit von Rahmenstrukturen, die Wechselwirkungen von festen Druckelementen mit Zugbestandteilen auszunutzen, so dass jedes Element mit maximaler Effizienz und Wirtschaftlichkeit arbeitet ( Wiki ). Der Begriff ist relativ neu, erschien in den 1960er Jahren. Die Tabelle im obigen Bild steht (oder hängt) ohne Beine, genau aufgrund des Tensegrity-Prinzips.
Es gibt viele moderne Anwendungen dieses Ansatzes in der Architektur, von wo aus er vor allem bei der Gestaltung von Brücken auftrat.

Die größte Tensegrity-Brücke der Welt, Australien. Eine Quelle
Alternative Verwendungen :)
Tensegrity in der Robotik
Einer der ältesten Bereiche der Robotik - Industriemanipulatoren - erlebt derzeit eine neue Entwicklungsstufe, die mit dem sogenannten verbunden ist. kollaborative Robotik. In der Rede von Fachleuten auf diesem Gebiet sind zwei Begriffe mit großer Häufigkeit zu hören - Steifheit und Compliance.
In der Industrierobotik bezieht sich der Begriff Compliance auf Flexibilität und Compliance. Ein nicht konformer, steifer Roboter ist ein Gerät, das unabhängig von den äußeren Kräften funktioniert. Der Endeffektor des Roboters folgt jedes Mal genau dem gleichen Weg. Andererseits kann sich der Endeffektor eines kompatiblen Roboters auf verschiedenen Trajektorien bewegen, um eine Aufgabe zu erledigen und unterschiedliche Kräfte auf das Objekt auszuüben. Zum Beispiel kann ein Roboter ein Ei greifen, ohne es zu zerdrücken. Kontrollierte Steifigkeit ist das Herzstück der kollaborativen Robotik.
Die Ideen für den Einsatz von Tensegrity in der Robotik stammen aus der kollaborativen und „weichen“ Robotik. Tensegrity-Strukturen sind leicht, schlagfest und ermöglichen die Kontrolle ihrer Steifigkeit (Compliance) und Konfiguration (Form).
Das bekannteste Beispiel für die Anwendung von Tensegrity in der Robotik ist der Super Ball Bot der NASA, ein faltbarer Bodenroboter, mit dem Planetenoberflächen untersucht werden sollten. Dank der kugelförmigen Struktur von Kabeln und Seilen kann der Roboter einem Sturz aus großer Höhe standhalten, wenn er von einem Raumschiff auf den Planeten fällt. Sobald der Roboter an der Oberfläche ist, kann er in jede Richtung rollen, indem er die Länge der Kabel und / oder Stangen steuert.
IEEE Spectrum Video auf NASA SUPERball v2
Tensegrity-Roboter an der Innopolis University
An der UI entwickeln wir einen mathematischen Apparat zum Modellieren, Entwerfen und Steuern von Robotersystemen mit spannungsgekoppelten Strukturen mit variabler Steifheit (dies ist Tensegrity). Dies ist eine grundlegende Arbeit, die in einer Vielzahl von Robotern zu finden ist, wie z. B. Tensegrity-Manipulatoren oder Laufrobotern.
Der Tensegrity-Manipulator und Absolvent und Forscher der UI Oleg Balakhnov
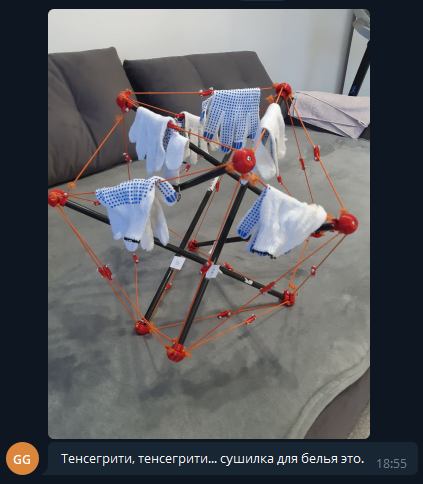
Oleg war der erste, der mit uns Prototypen von Tensegrity-Robotern entwickelte - zunächst aus Holzstöcken und Gummibändern. Das Foto vom Bau von Sushi-Sticks hält vielleicht auch die Geschichte der Chats fest.
Tensegrity Vibrobot
-
-
Synergistischer Effekt

Du hast es wahrscheinlich schon bekommen
Ich habe eine Drohne, ich habe Tensegrity. Pfui! (Tensodron)
Einmal in unserer Garage kam ich an einem auffälligen seltsamen Design vorbei:
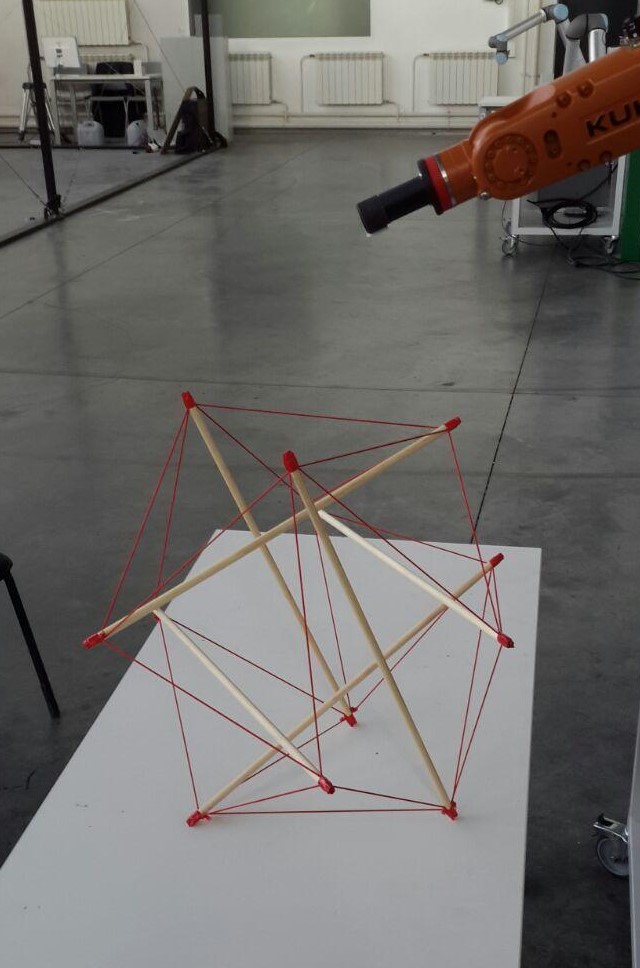
Ich fragte: "Was ist das?" Mir wurde gesagt: "Eine nicht zu tötende Struktur - lass sie fallen, aber sie bricht nicht."
Ich bin gebrochen (eigentlich nur geschrumpft - Form geändert, weil die Gummibänder locker und falsch ausgerichtet waren). Aber wir brauchen ein solches Design für Drohnen! Und wir haben ein abenteuerliches Experiment gestartet.
Tensegrity Survival Test Video
Ein härterer Test
Squishy robotics — , - , ,
Squishy robotics — , - , ,
Abenteuer

Sergey billigt das abenteuerliche Experiment. Jeff Bezos ist auch
Sergey Savin - ein leitender Forscher, außerordentlicher Professor, ein seriöser Wissenschaftler mit einem Doktortitel im Alter von 25 Jahren und vielen Rating-Veröffentlichungen. Er ist einer der Gründerväter von Tensegrity Robotics an der UI und hat mehrere Stipendien für die Entwicklung von Tensegrity in Robotics erhalten.
Igor erwägt eine Idee
Dmitry, Oleg und Haney sammeln das erste Tencodron (es sieht nach etwas aus). Dmitry DevittGigaFlopsis- ein Forscher und Doktorand der Universität und derjenige, der die modernsten Technologien anwendete - Carbonrohre und Kevlar-Fäden, 3D-Druck mit Carbon und weichem Kunststoff, implementierte alles und ließ es fliegen.

Der Prozess des Zusammenbaus des Ura- Tensodrons

. passierte!
Fliegen!
Dmitry ist auch der erste Schauspieler nach dem Tensodron in den epischen Videos seiner Flüge. Bewertung:
Ein Spiel mit zwei Schauspielern, die sich selbst in der Hauptrolle spielen. Video von DeluuusiOn
Mehr zum Prototypenbau
Das Design der ersten Prototyp-Drohne stellte sich wie folgt heraus:
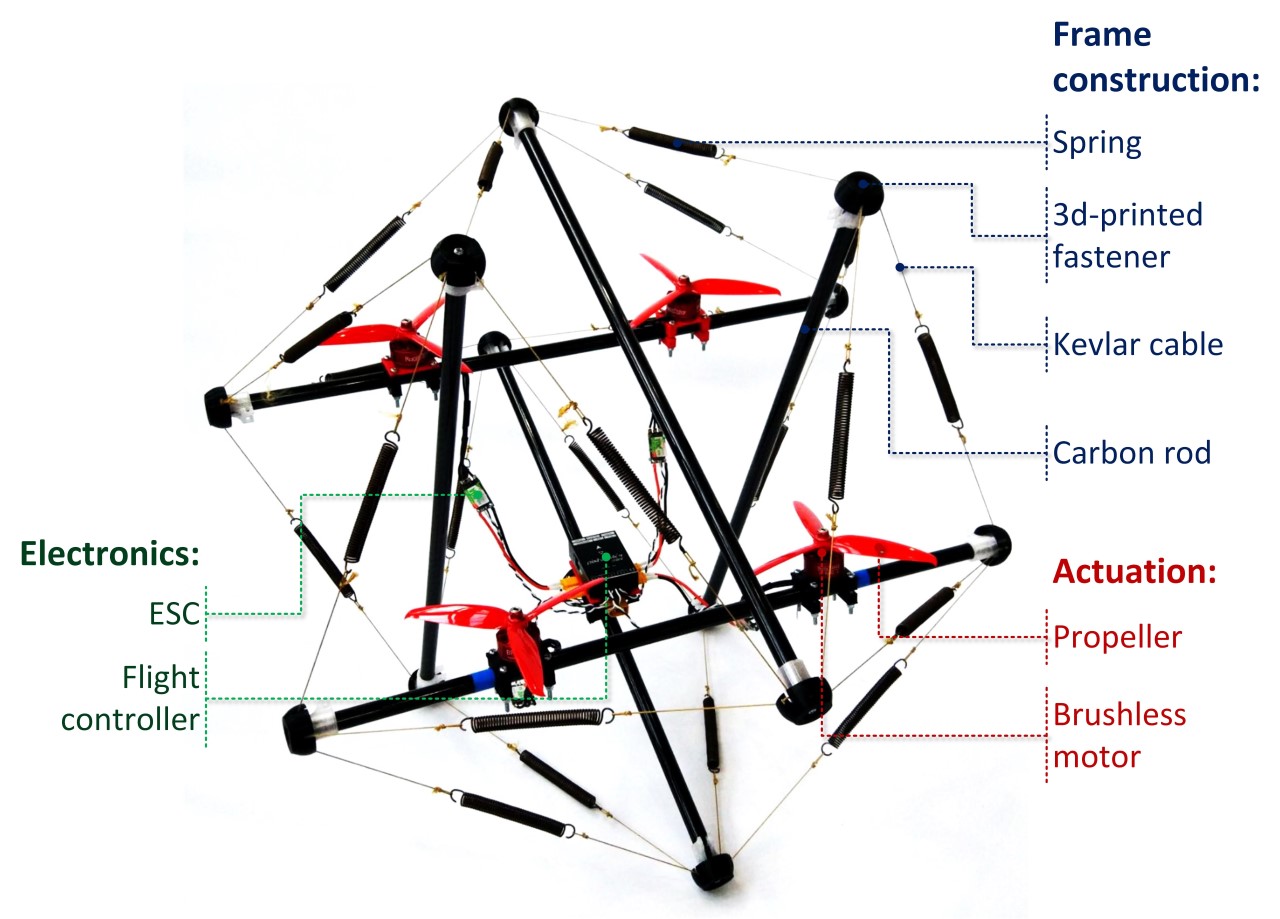
Das Design des Prototyp-Tensodrons der Universität Innopolis
Das grundlegende Sechs-Stab-Design der Tensegrity wurde verwendet. Im Gegensatz zu starren Quadcoptern haben wir zwei Paar Propellermotoren, die auf unterschiedlichen Trägern montiert sind. Außerdem ist keiner von ihnen fest mit dem Autopiloten verbunden, der sich am Abblendlicht befindet.
Die Bordelektronik und die elektromechanischen Komponenten des Drohnenprototyps umfassen:
- Autopilot CUAV Pixhawk v5 mini;
- 3s 1400mAh Batterie;
- Racerstar REV35 35A BLheliS 3-6S ESC-Regler;
- Racerstar Racing Edition BR2205 2300KV Motoren;
- IMU-Sensoren MPU9250.
Die Kabel bestehen aus Kevlar-Faser mit kundenspezifischen Federn. Die Stangen bestehen aus Kohlefaserrohren. Endkappen und andere Kleinteile werden in 3D gedruckt.
Managementprobleme
Das Hauptsteuerungsproblem im Vergleich zu einer herkömmlichen harten Drohne sind Vibrationen, die zum einen eine größere Amplitude haben und zum anderen für die Steuerung und verschiedene Motoren unterschiedlich sind, weil Sie werden auf verschiedenen Trägern installiert (obwohl dies auch ein Plus sein kann - Schwingungsisolation).
Frühe kardanische Tensodron-Tests: Vibration (Entschuldigung für das vertikale Video)
Frühe Tests des Tensodrons im Flug: Vibration
Wir sind nicht alleine
, .
( ), , Imperial College London:
, : — .
.. , , , .
, , :
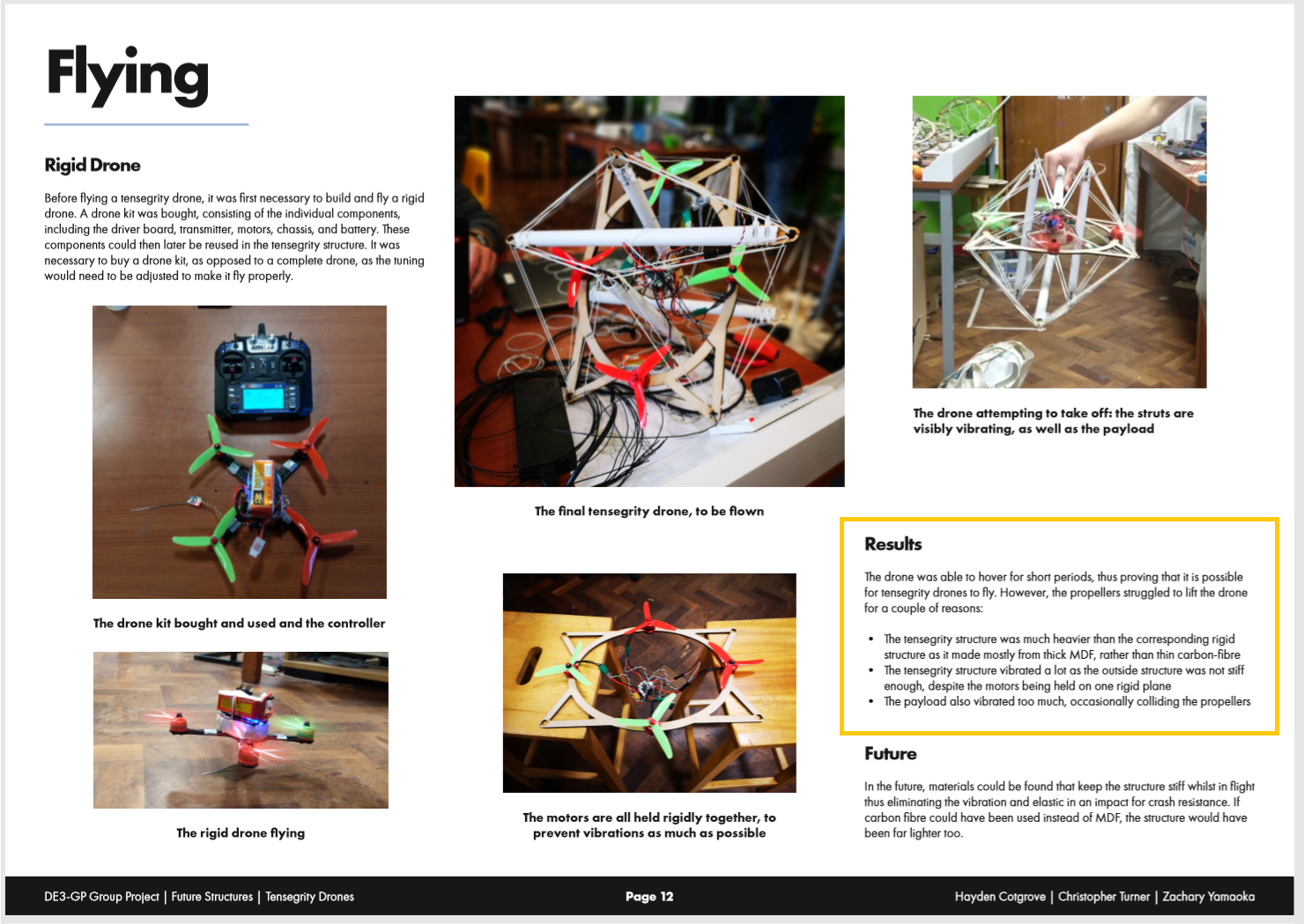
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
- The tensegrity structure was much heavier than the corresponding rigid structure as it made mostly from thick MDF, rather than thin carbon-fibre
- The tensegrity structure vibrated a lot as the outside structure was not stiff enough, despite the motors being held on one rigid plane
- The payload also vibrated too much, occasionally colliding the propellers
Wir lösen diese Probleme von zwei Seiten - indem wir das Design verbessern, um Vibrationen während des Flugs zu reduzieren, und Steuerungs- und Zustandsschätzungsalgorithmen entwickeln, um Vibrationen zu unterdrücken und eine bessere Kontrolle zu erzielen, einschließlich der Berücksichtigung zusätzlicher Daten von IMU-Sensoren auf den Strahlen und eines dynamischen Modells der Tensegrity-Struktur.
Auf den Boden fallen, gefolgt von einem Start in Innenräumen (ohne Montage)
Noch ein paar Testvideos
, , . , .. .
( )
( )
Was weiter?
Forschung
Es liegen noch viele interessante Dinge vor uns:
Anwendung
Jetzt fliegt dieses Ding von selbst auf einer bestimmten Mission (einschließlich GPS auf der Straße und in Innenräumen - wir werden visuelle Kilometerzähler verwenden). Für uns liegt ein weiterer Antrag auf Besichtigung der Räumlichkeiten auf der Hand.
Abgesehen von der Kontrolle und Form auf niedriger Ebene ist das Tensodron eine reguläre Drohne, in die wir unsere Bewegungsplanungsalgorithmen zur autonomen Erkundung und Vermeidung von Hindernissen integrieren.
Ein Beispiel für die Durchführung einer automatischen Inspektion. Masterprojekt von Victor Massague, unserem Absolventen und in naher Zukunft hoffentlich einem Mitarbeiter aus Barcelona
Und wieder Forschung
Das Potenzial des Tensegrity-Drohnen-Designs ist viel größer als bei einer einfachen Drohne.
Erinnerst du dich an die faltbare Drohne aus dem Video oben? Was ist mit SUPERball ?
Wenn Sie also die Länge der Stangen oder die Spannung der Kabel der Tensegrity-Drohne aktiv ändern, können Sie deren Konfiguration (oder einfacher die Form) steuern!
Es stellt sich heraus, Foldable Morphing Tensodrone. In diesem Bereich forschen wir aktiv.
Tensodron mit variabler Geometrie der Universität Innopolis (Konzept)

Die Verwendung von Tensegrity für ein Flugzeug eröffnet neue Forschungsherausforderungen. Der Prototyp des Entwurfs zeigt bereits, dass die Idee funktioniert und zum Schutz des UAV verwendet werden kann.