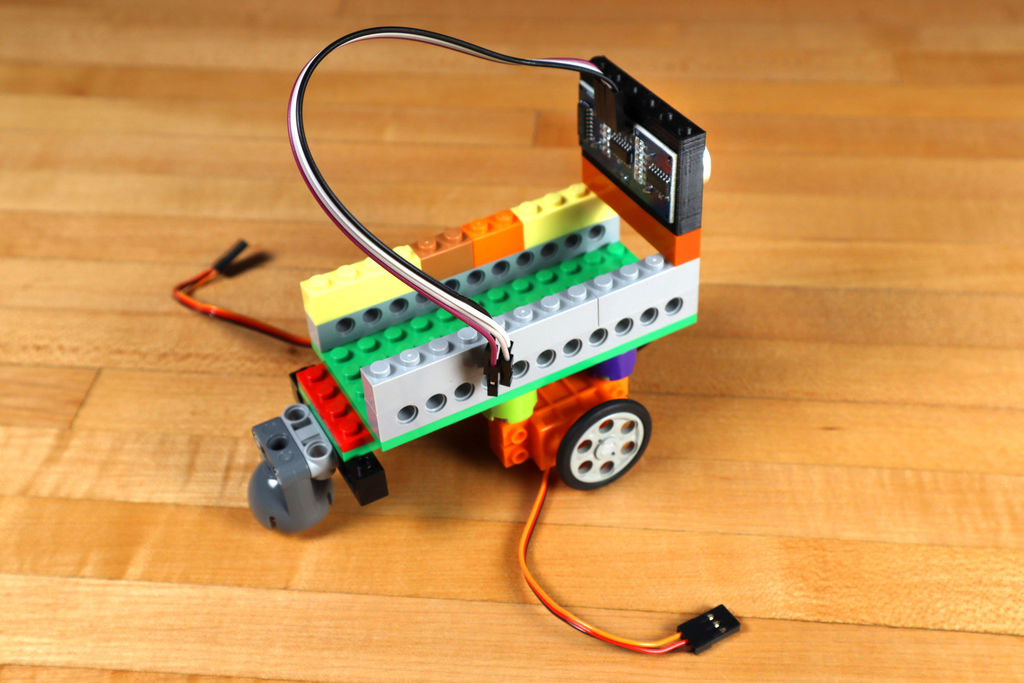
Wir lieben LEGO und Crazy Circuits [LEGO kompatible Elektronik / ca. transl.], deshalb haben wir beschlossen, sie zu einem einfachen und interessanten Roboter zu kombinieren, der Hindernissen ausweichen kann. Wir zeigen Ihnen, wie Sie einen solchen Roboter zusammenbauen und beschreiben den Prozess im Detail. Ihre Version des Roboters stimmt möglicherweise nicht genau mit unserer überein.
Hier ist eine Liste der erforderlichen Elektronik- und LEGO-Teile. Fühlen Sie sich frei, mit ihnen zu experimentieren.

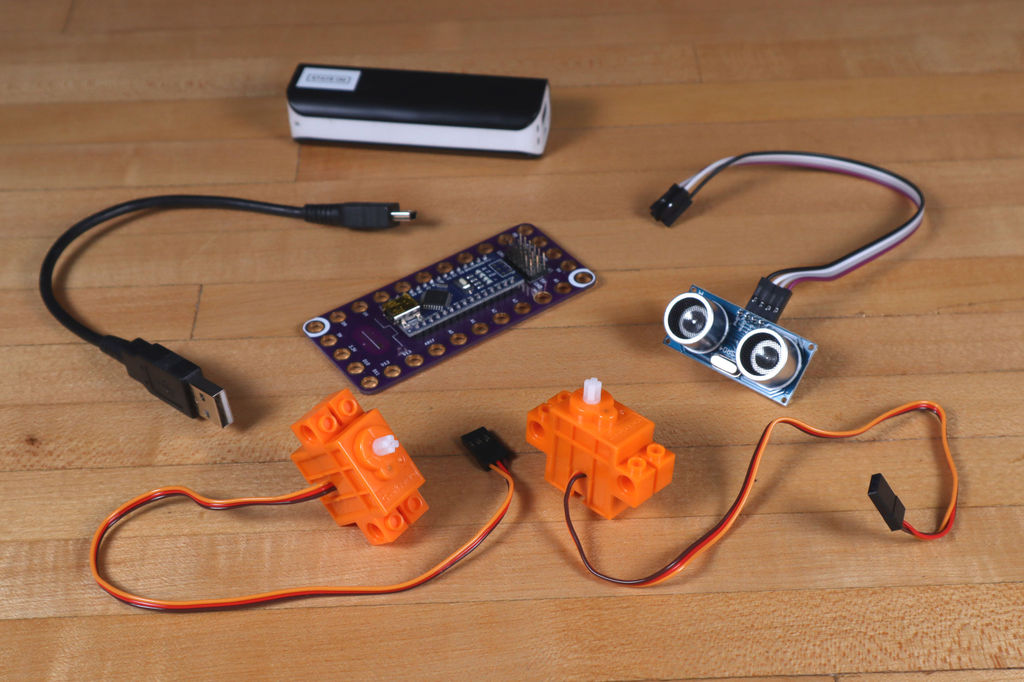
Komponenten
Elektronik
- 1 x Robotics Board von Crazy Circuits
- 2 x LEGO-kompatibler Volldrehungs- Servomotor
- 1 x Ultraschall-Abstandssensor HC-SR04
- 4 x Überbrückungskabel von Buchse zu Buchse
- 1 x externes Netzteil mit USB
Für unser Projekt haben wir ein kleines externes Netzteil ausgewählt, das genau in unseren Roboter passt. Möglicherweise müssen Sie Ihre eigenen für Ihr externes Netzteil oder für einen Satz Batterien entwerfen.
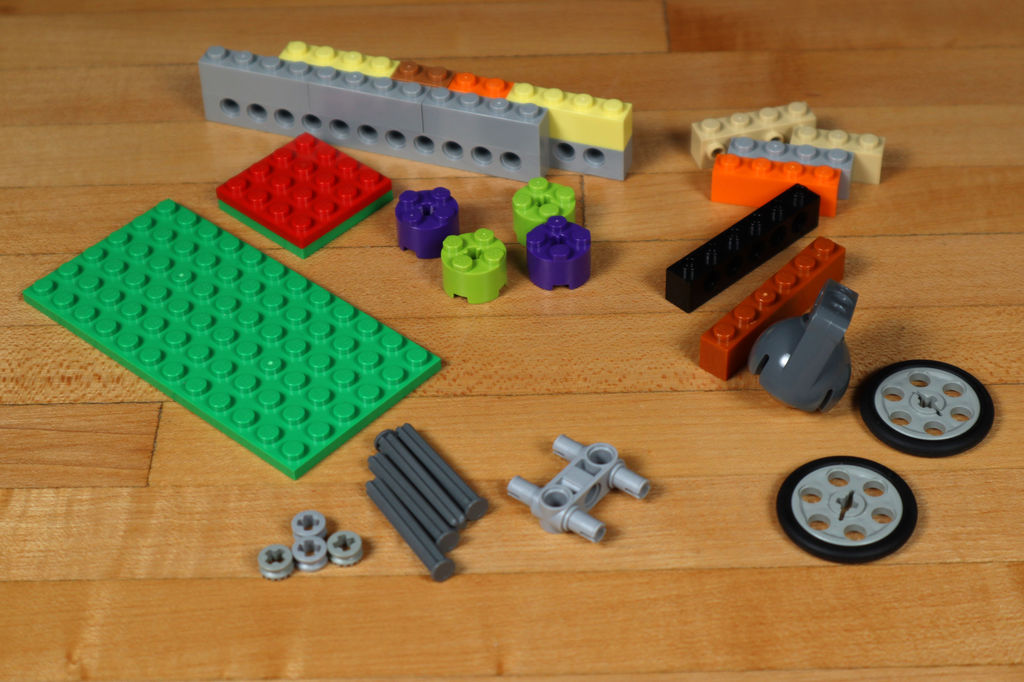
Lego
Wir haben verschiedene Details verwendet, und wir empfehlen, dass Sie dies tun, wie Sie es für richtig halten und was Sie zur Hand haben. Es ist wichtig, dass Sie die Servos an der Unterseite und am Ultraschallsensor befestigen können, damit er nach vorne schaut, und die Platine und die Stromversorgung irgendwie sichern können. Dazu können Sie doppelseitiges Klebeband, Gummibänder und Klettverschluss verwenden. Es gibt Links zu unseren Stücken im BrickOwl Store, aber Sie können sie überall dort kaufen, wo LEGO und kompatible Sets verkauft werden.
- 2 x LEGO Keilriemenrad (4185/49750)
- 1 x LEGO EV3 Technic Ball Pivots Set 5003245
- 1 x LEGO Technic Cross Block Beam 3 mit vier Stiften (48989/65489)
- 1 x LEGO Technic Brick 1 x 6 mit Löchern (3894)
- 2 x LEGO Achse 4 mit Endanschlag (87083)
- 4 x LEGO Halbbuchse (32123/42136)
- 4 x LEGO Brick 2 x 2 Round (3941/6143)
- 1 x LEGO Platte 6 x 12 (3028)
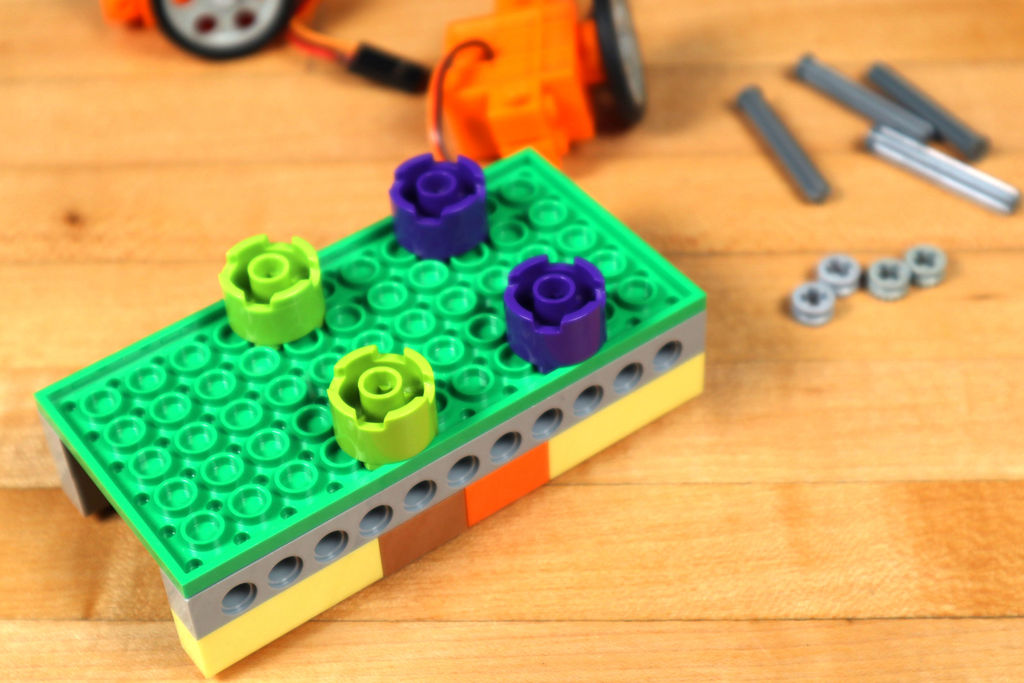
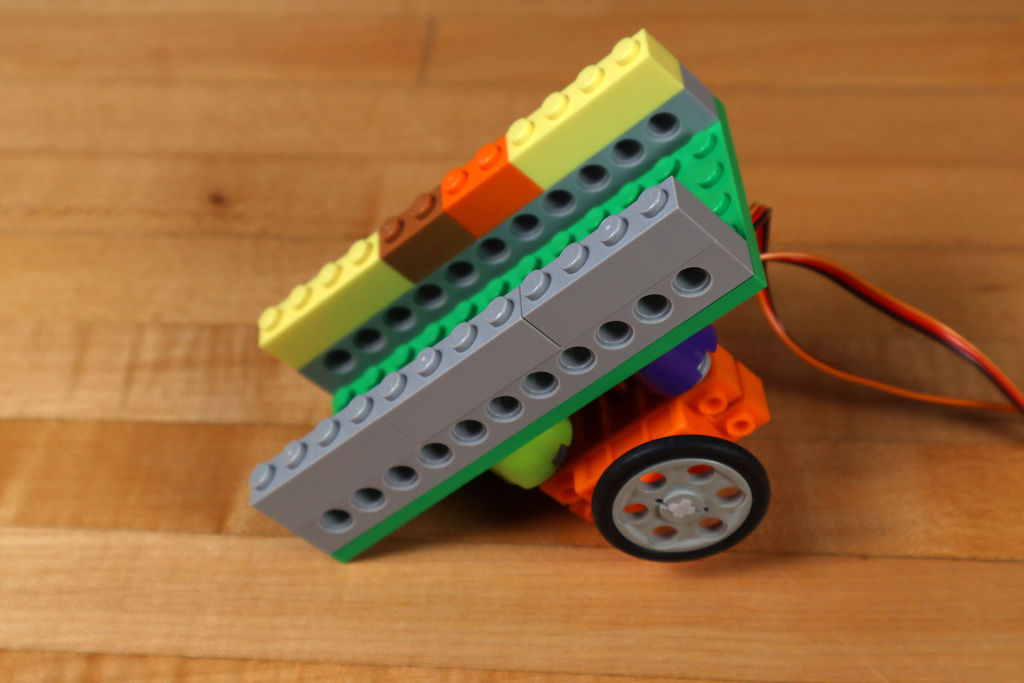
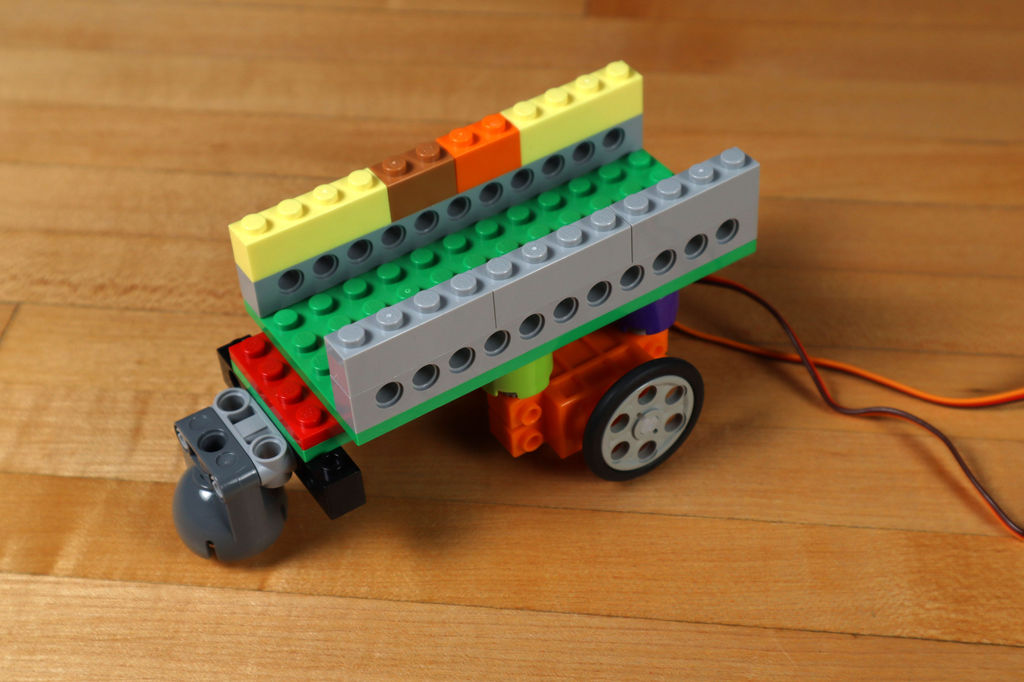
Schritt 1: Aufbau des LEGO Chassis
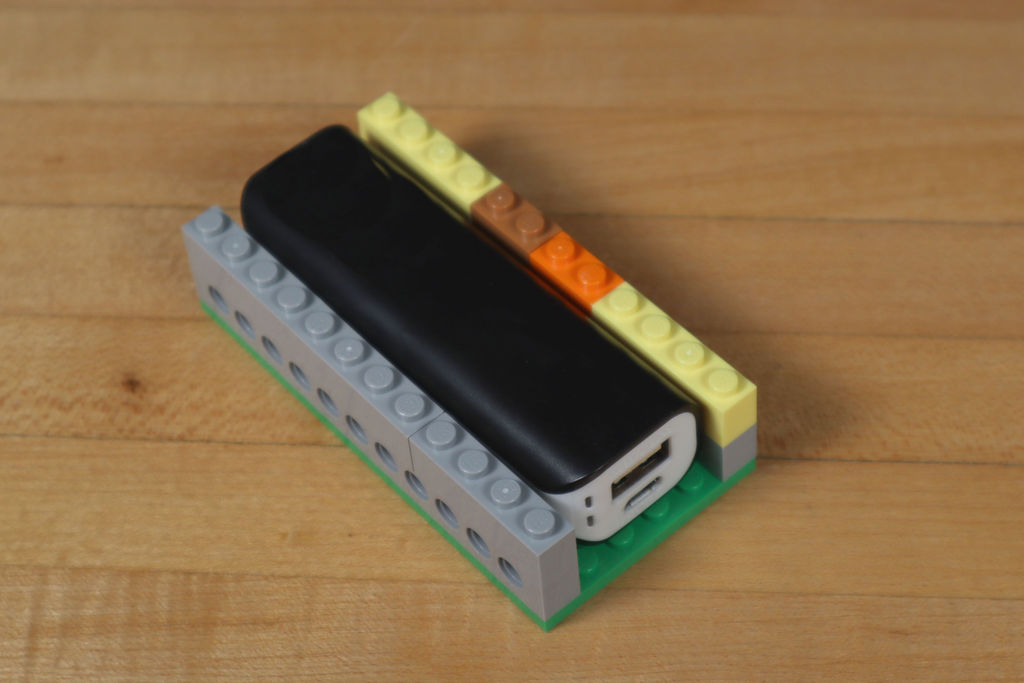
Wir begannen mit einer 6 × 12 LEGO Platte, die die Mindestgröße war, mit der wir zufrieden waren. Sie können eine größere verwenden, aber eine kleinere wird schwieriger.
Die Breite des Roboters wurde durch das verfügbare externe Netzteil bestimmt, da wir die Möglichkeit brauchten, ihn in Position zu schieben. Eine größere Batterie erfordert einen größeren Roboter.
Das Gehäuse muss hoch genug sein, um sowohl den Akku als auch die Platine oben aufzunehmen.
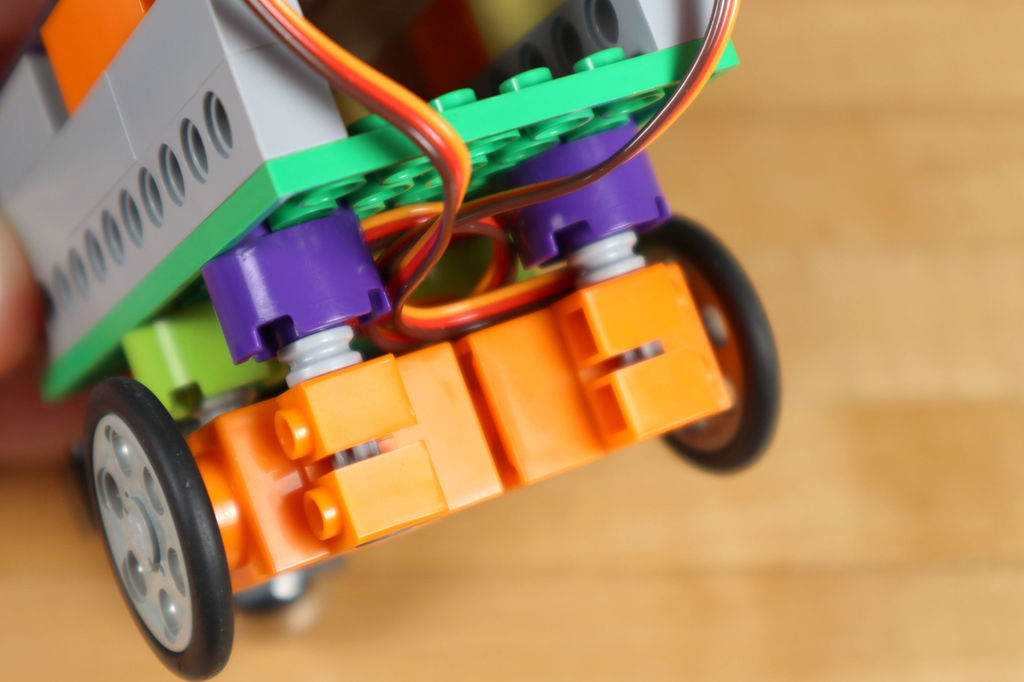
Schritt 2: Räder hinzufügen
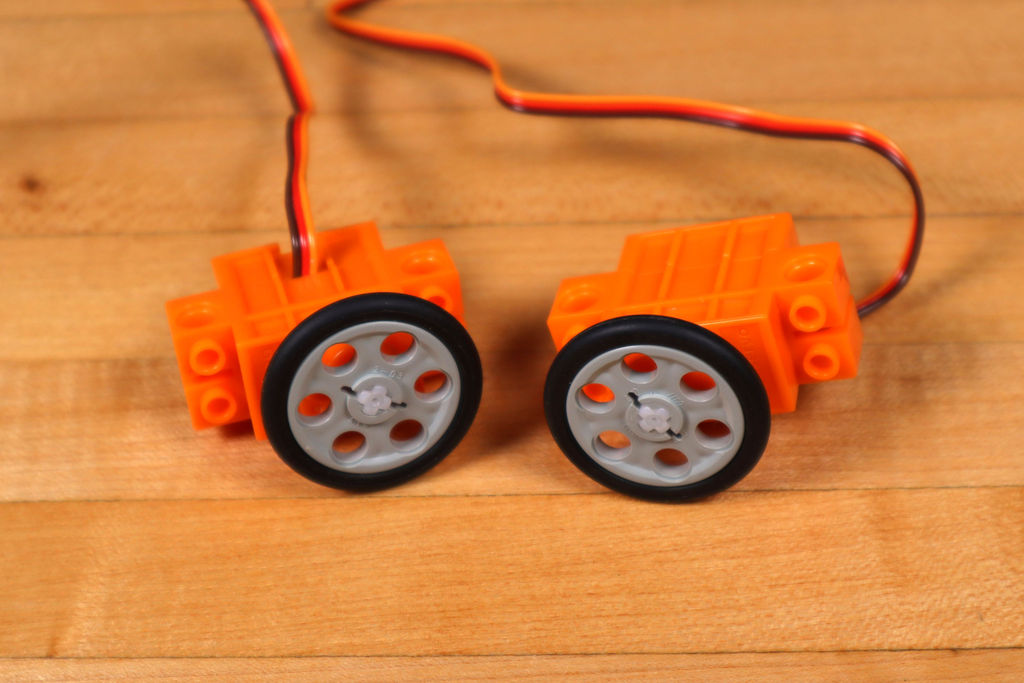
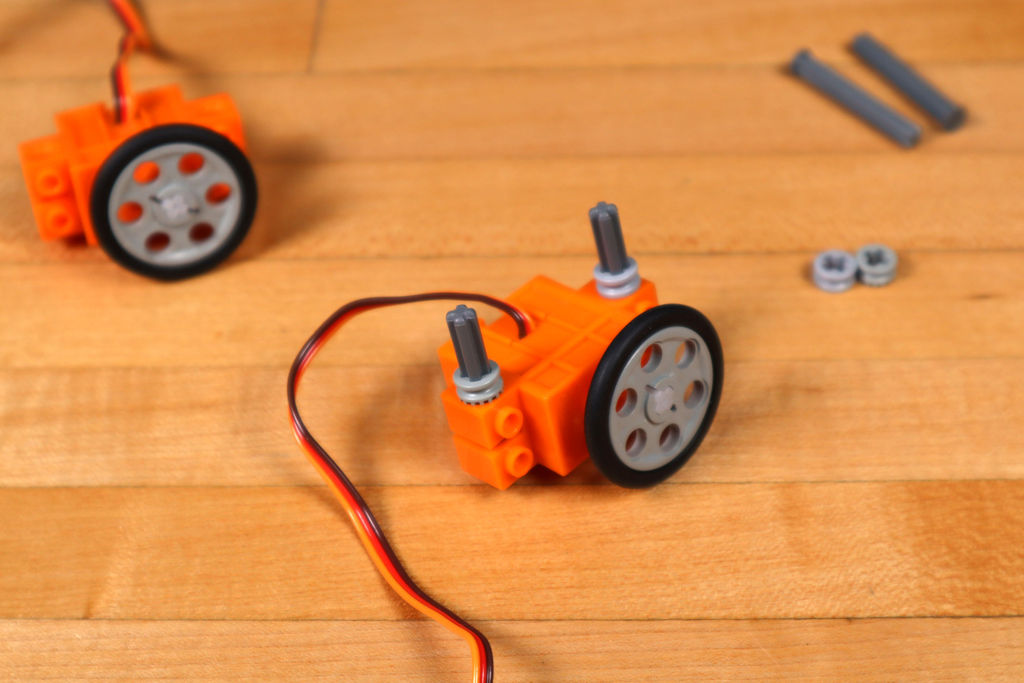
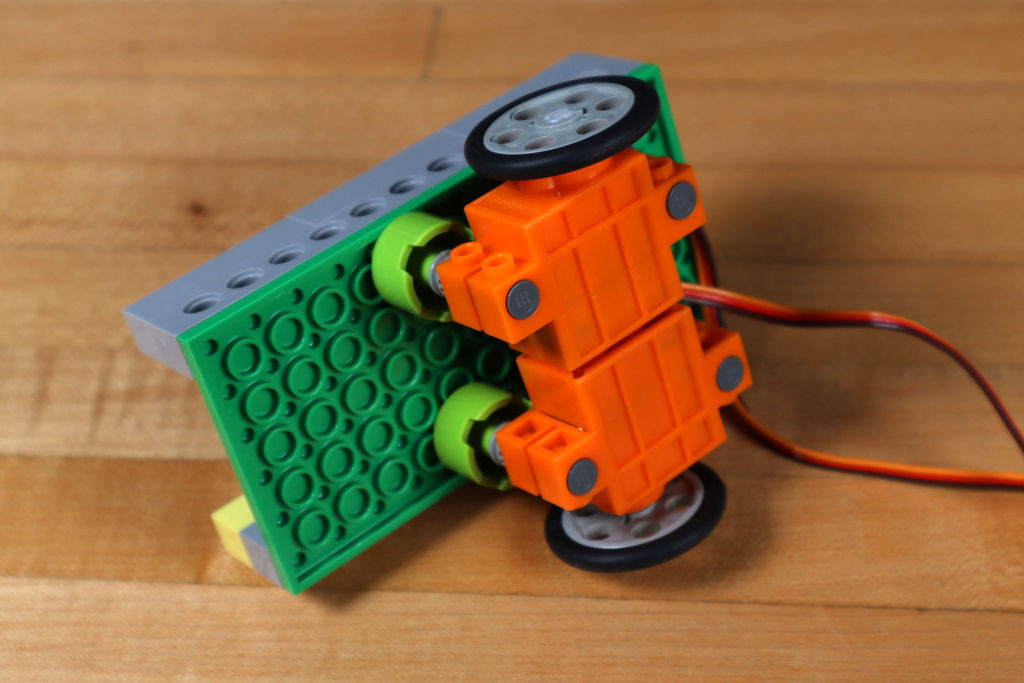
Jedes Servo muss unter dem Chassis platziert werden. Daher benötigten wir folgende Komponenten:
- Achse 4 LEGO mit Stopper (87083)
- LEGO Hub (32123/42136)
- Runder LEGO Stein 2 x 2 (3941/6143)
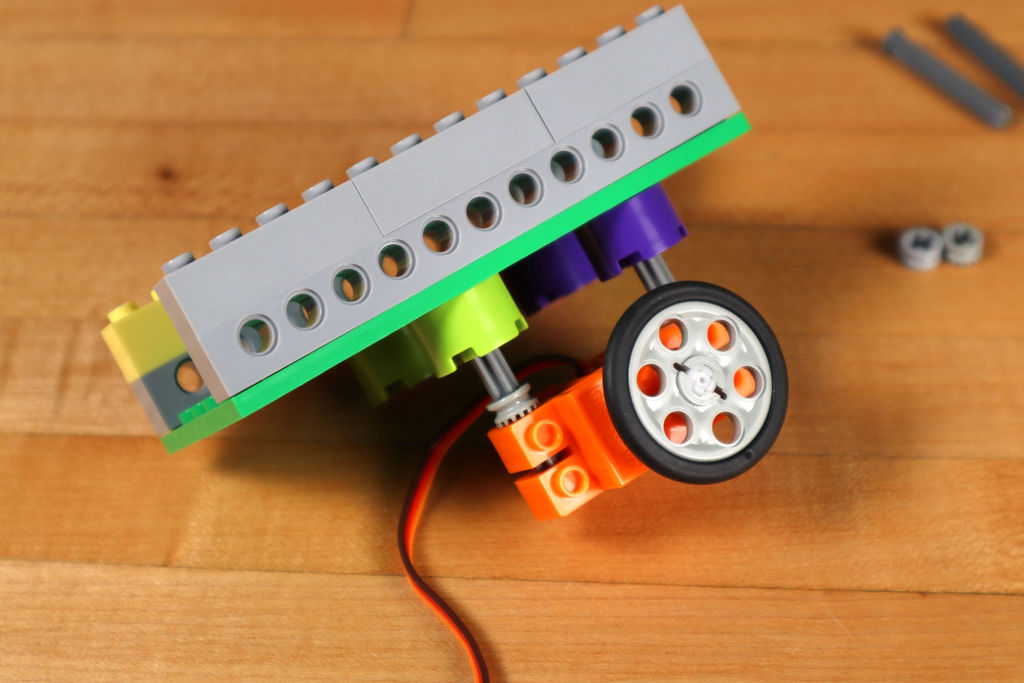
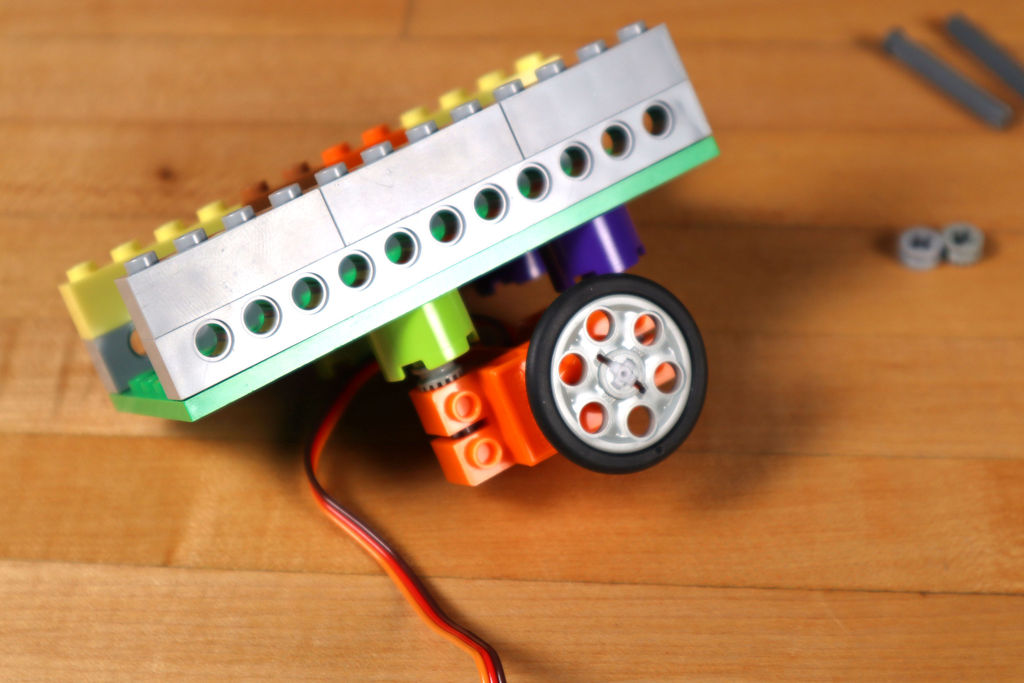
Um zwei Motoren zu reparieren, benötigen Sie jeweils 4 Teile der Komponenten. Fügen Sie nach dem Sichern ein Rad hinzu: LEGO Wedge Belt Wheel (4185/49750).
Wie bei anderen LEGO Modellen gibt es unzählige Optionen! Wir haben die aufgelisteten Komponenten erfolgreich ausgeführt, aber Sie können etwas anderes ausprobieren.
Schritt 3: Fügen Sie das Video hinzu
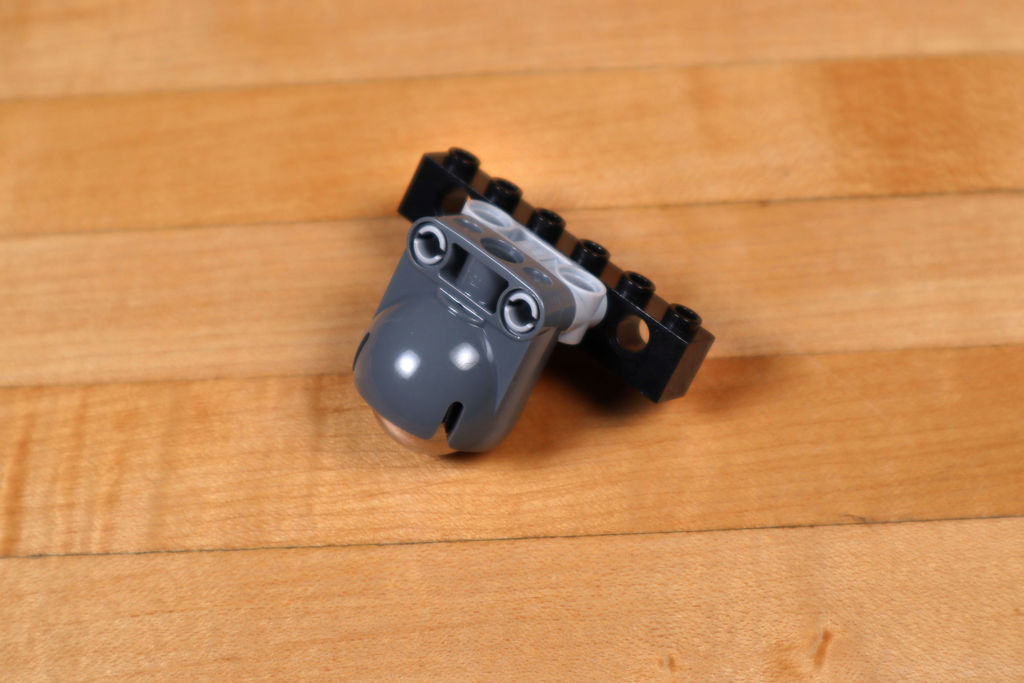
Unsere Walze ermöglicht es dem Roboter, auf zwei motorisierten Rädern, die als drittes Rad fungieren, in einem Flugzeug zu rollen - dies erleichtert dem Roboter das Drehen und Bewegen.
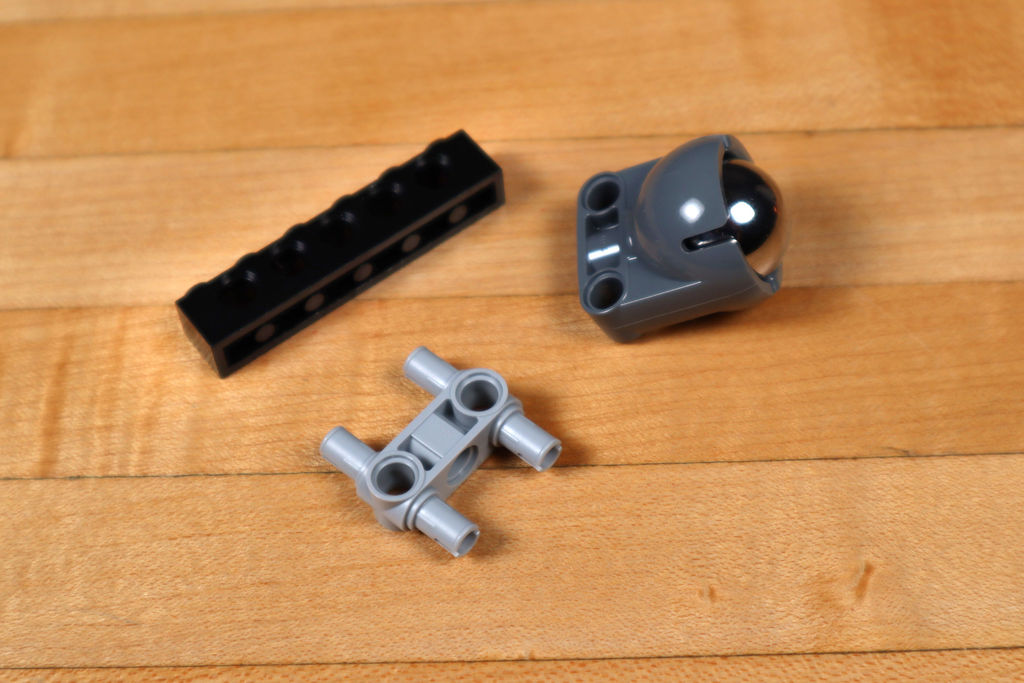
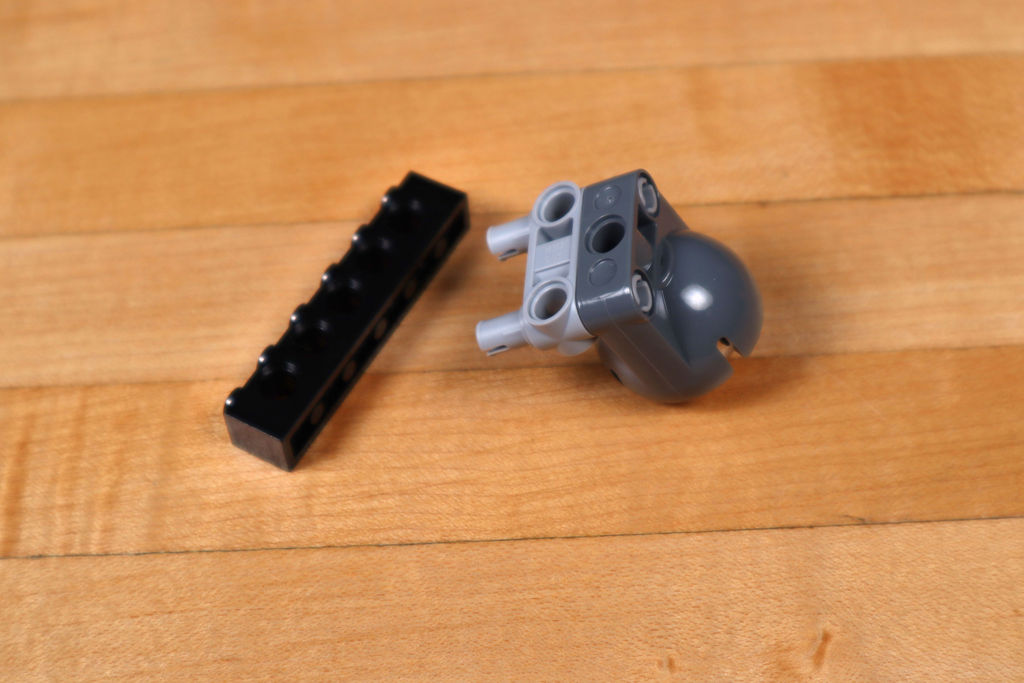
Zur Sicherung waren folgende Angaben erforderlich:
- LEGO EV3 Technic Ball Pivots Set 5003245
- LEGO Technic Cross Block Beam 3 mit vier Stiften (48989/65489)
- LEGO Technic Brick 1 x 6 mit Löchern (3894)
In der vorherigen Version haben wir nur runde LEGO-Teile für das "Bein" verwendet und es hat auf einer glatten Oberfläche gut funktioniert. Funktionierte aber nicht auf Teppich oder nicht glattem Boden. Wenn Sie keine Walze haben, sollten Sie dieses "Bein" verwenden.
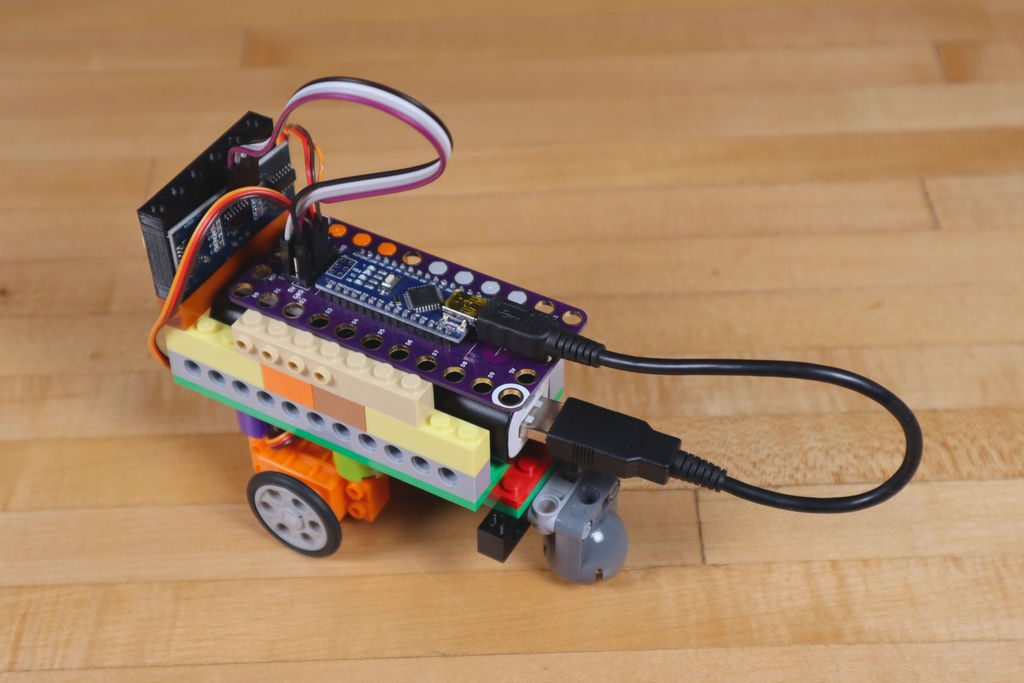
Schritt 4: Fügen Sie einen Abstandssensor hinzu
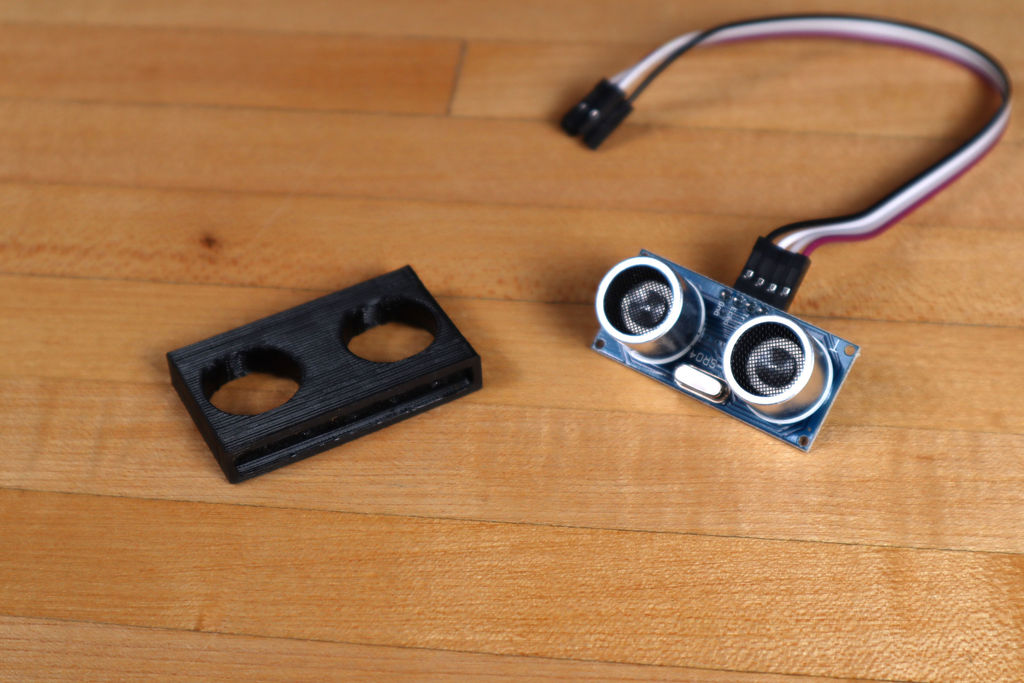
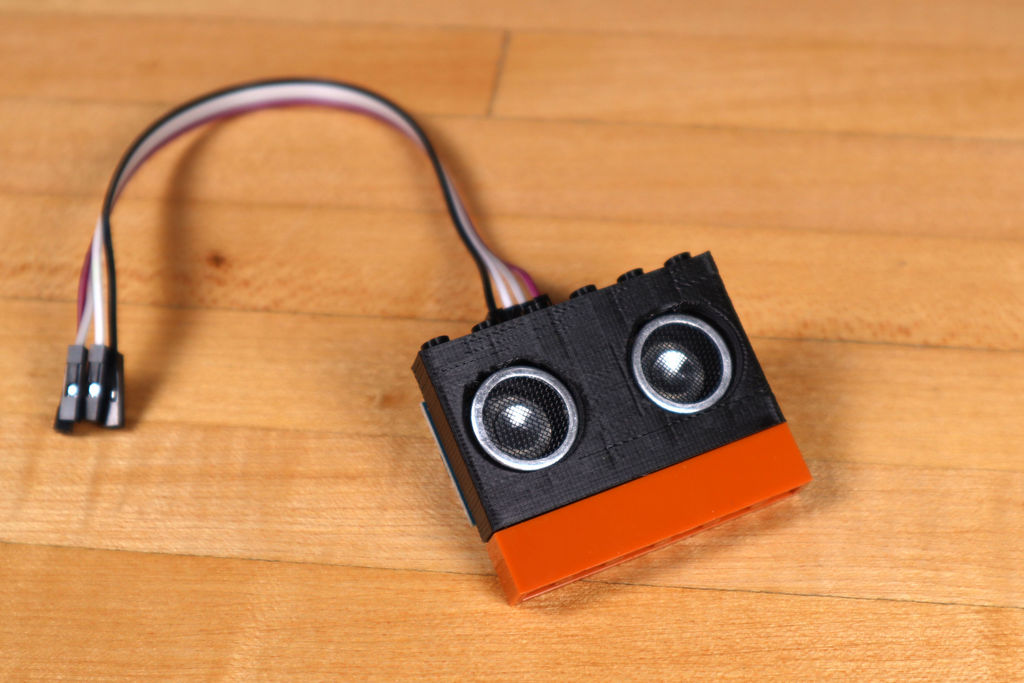
Der Ultraschall-Abstandssensor muss an der Vorderseite des Roboters angebracht sein, damit er „sieht“, wohin er fährt, und weiß, wann er anhalten muss, um nicht mit einem Hindernis zusammenzustoßen.
Für den Sensor haben wir ein LEGO-kompatibles Gehäuse in 3D gedruckt. Das Modell ist auf der Thingiverse-Website veröffentlicht: www.thingiverse.com/thing : 3171004
Wenn Sie keinen 3D-Drucker haben, finden Sie heraus, wie Sie den Sensor mit LEGO-Teilen, Klebeband, Gummibändern, Kabelbindern usw. halten. Es ist wichtig, dass er geradeaus schaut - wohin der Roboter geht, wenn er sich vorwärts bewegt.
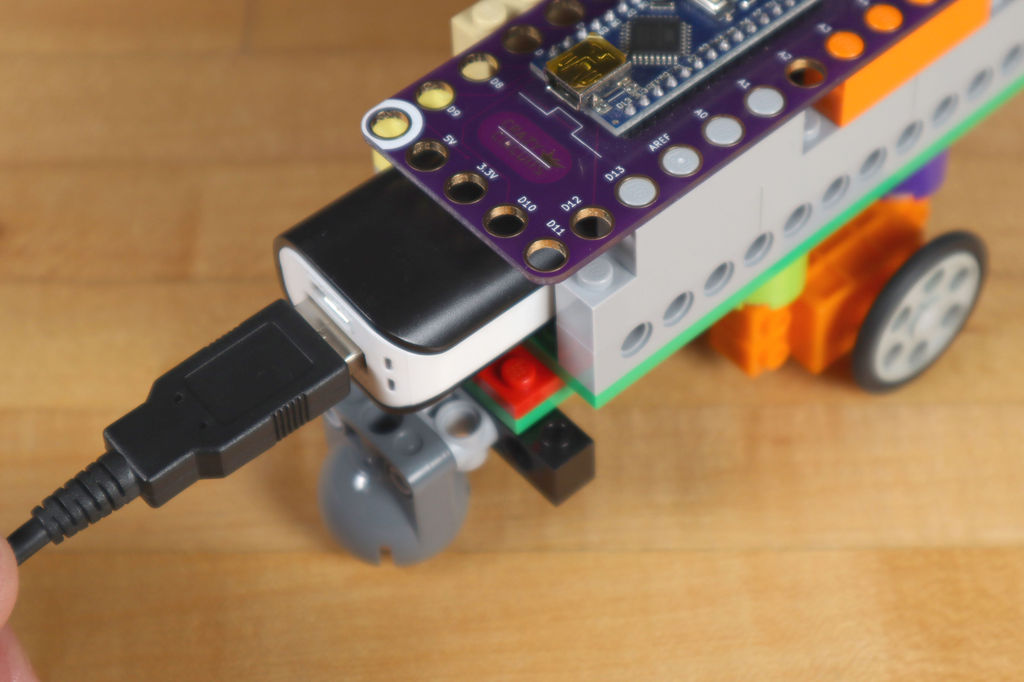
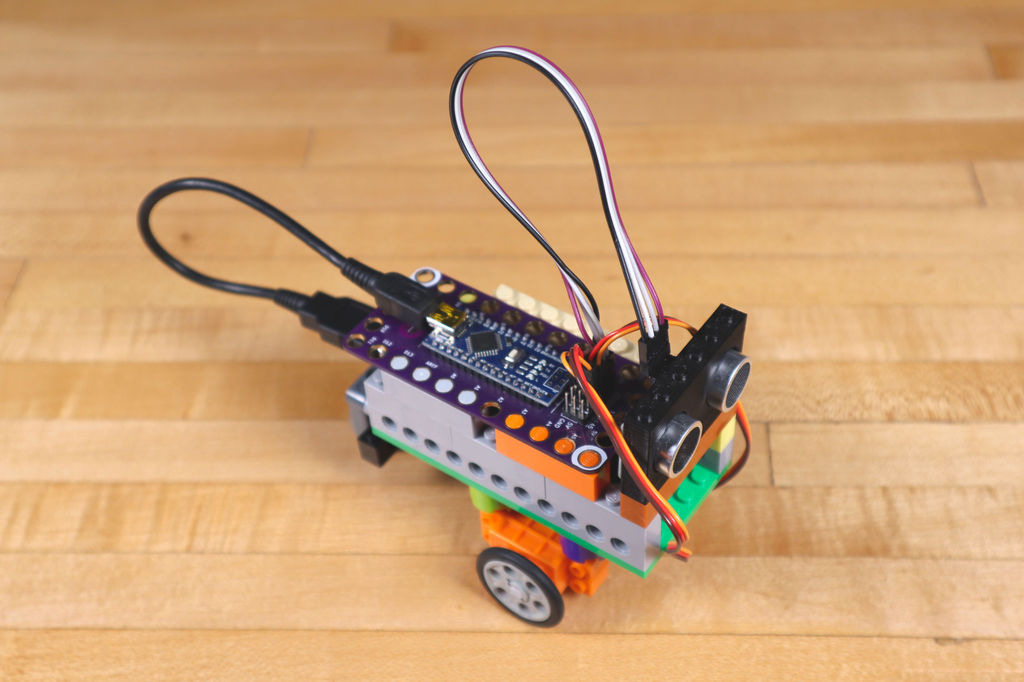
Schritt 5: Fügen Sie die Karte hinzu
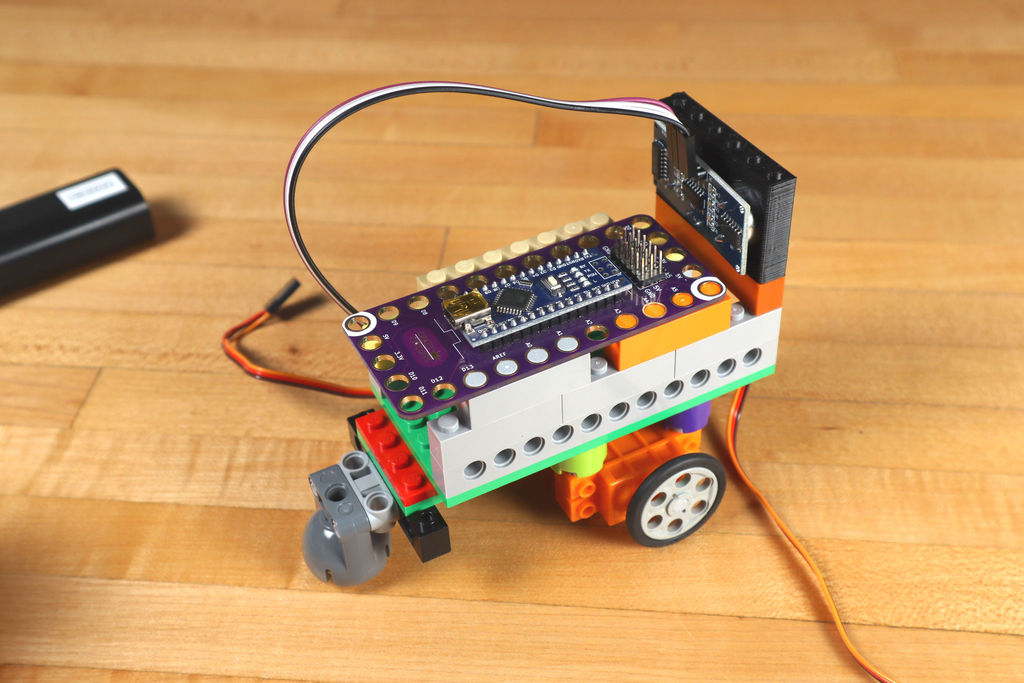
Die Gebühr ist das Gehirn der gesamten Operation. Es befindet sich auf LEGO Steinen und ist daher einfach zu befestigen.
Normalerweise wird das Robotics Board in Verbindung mit einem leitenden Klebeband verwendet, mit dem Sie elektrische Schaltkreise direkt auf dem LEGO basteln können. Da wir jedoch nur zwei Motoren und einen Abstandssensor haben, können diese direkt mit den Stiften auf dem Board verbunden werden.
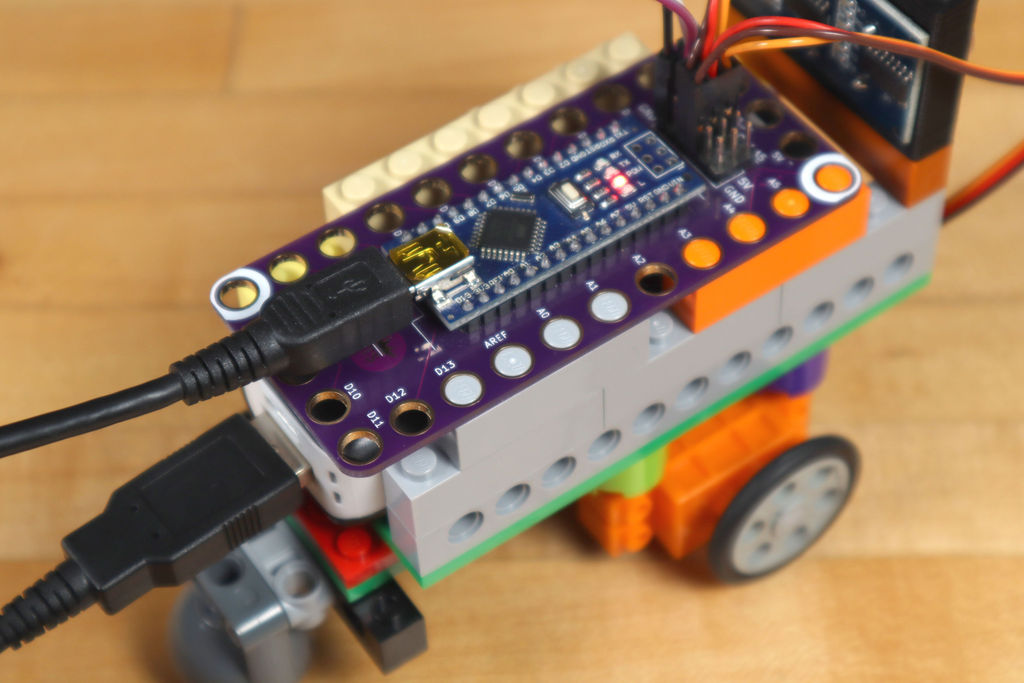
Wir platzieren die Platine so, dass das USB-Netzkabel leicht angeschlossen werden kann. Wir hatten das Glück, ein sehr kurzes USB-Kabel in der Kabelbox zu finden.
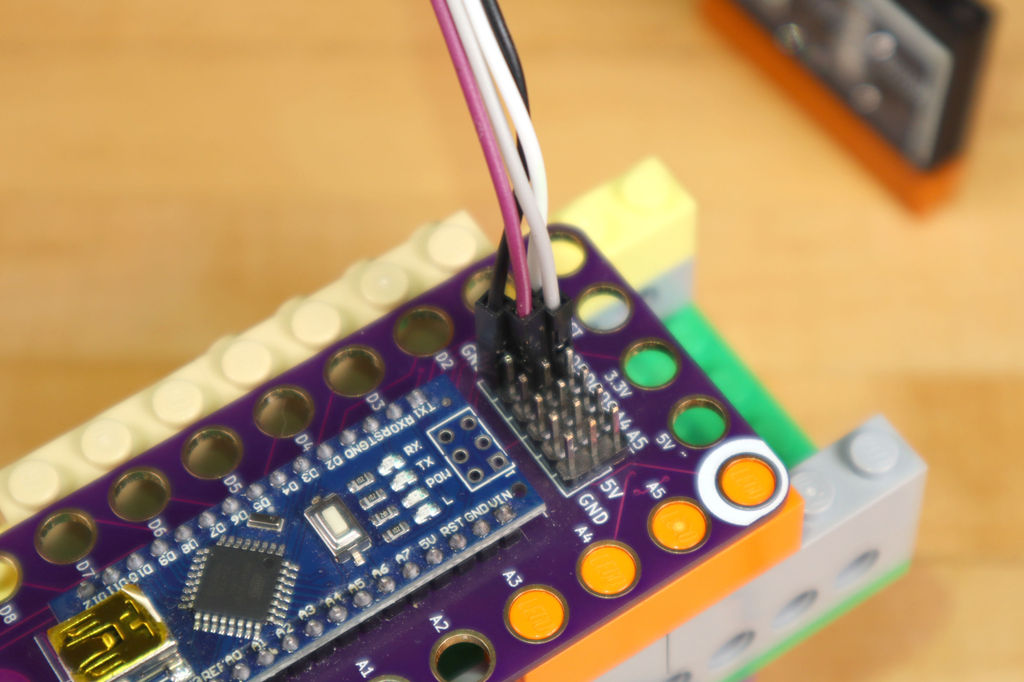
Jetzt können Sie den Sensor und die Motoren anschließen!
Für den Sensor: Der Echo-Anschluss sollte an Pin 3 auf der Platine angeschlossen werden, der Trigger-Anschluss an Pin 5, VCC an 5 V, Gnd an GND. Somit erhält der Sensor Strom und kommuniziert mit der Karte.
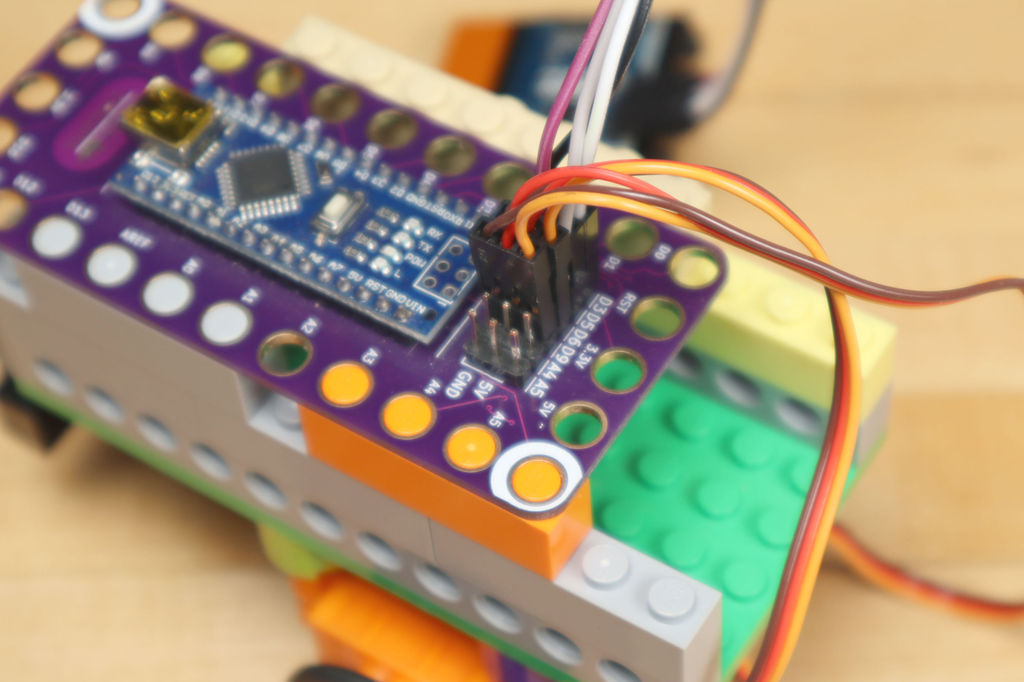
Dann müssen Sie jeden der Motoren anschließen. Es ist einfach zu machen - braune Drähte zu GND, rote Drähte zu 5V, orange Drähte zu D6 für den linken Motor und D9 für den rechten.
Schritt 6: Programmieren Sie das Robotics Board
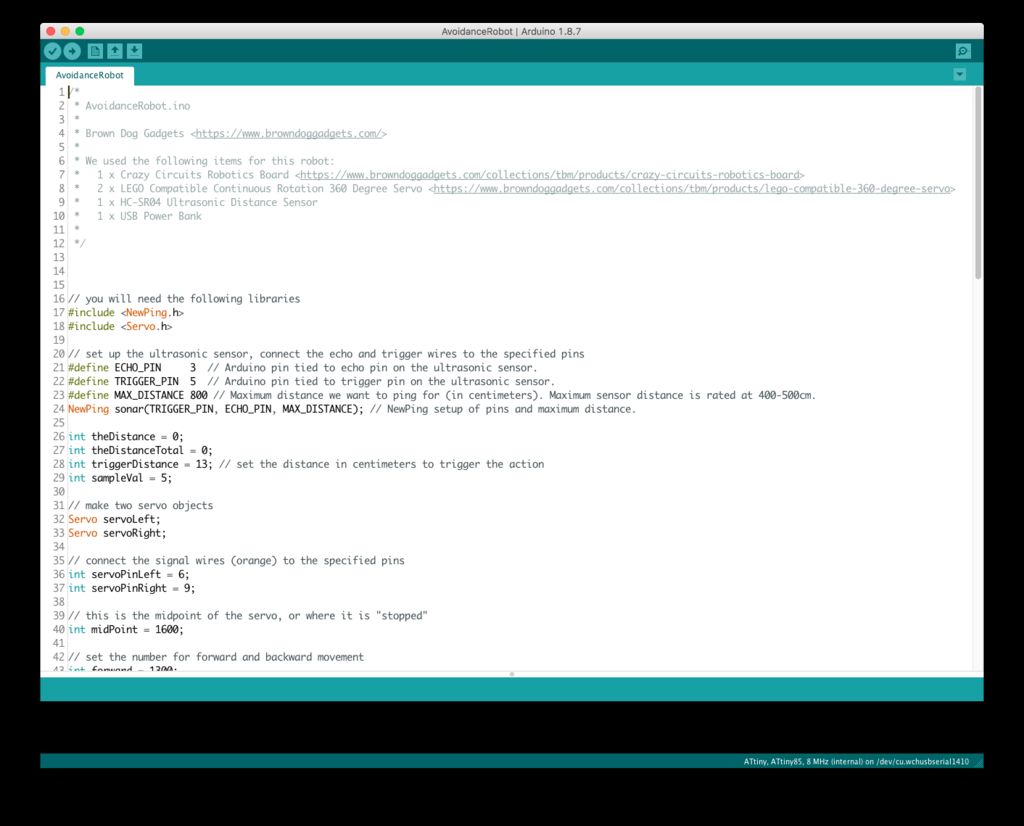
Bevor der Roboter arbeiten kann, muss der Code in den Mikrocontroller geladen werden. Stellen Sie zuvor sicher, dass auf Ihrem Computer die neueste Version der Arduino IDE installiert ist .
Wir haben unseren Code in das Repository auf GitHub hochgeladen:
github.com/BrownDogGadgets/CrazyCircuits/tree/master/Projects/Avoidance%20Robot
Der Code ist einfach, es gibt viele Kommentare, so dass klar ist, was für was verantwortlich ist.
Sie benötigen außerdem die NewPing-Bibliothek
bitbucket.org/teckel12/arduino-new-ping/wiki/Home
Schritt 7: Lassen Sie den Roboter laufen
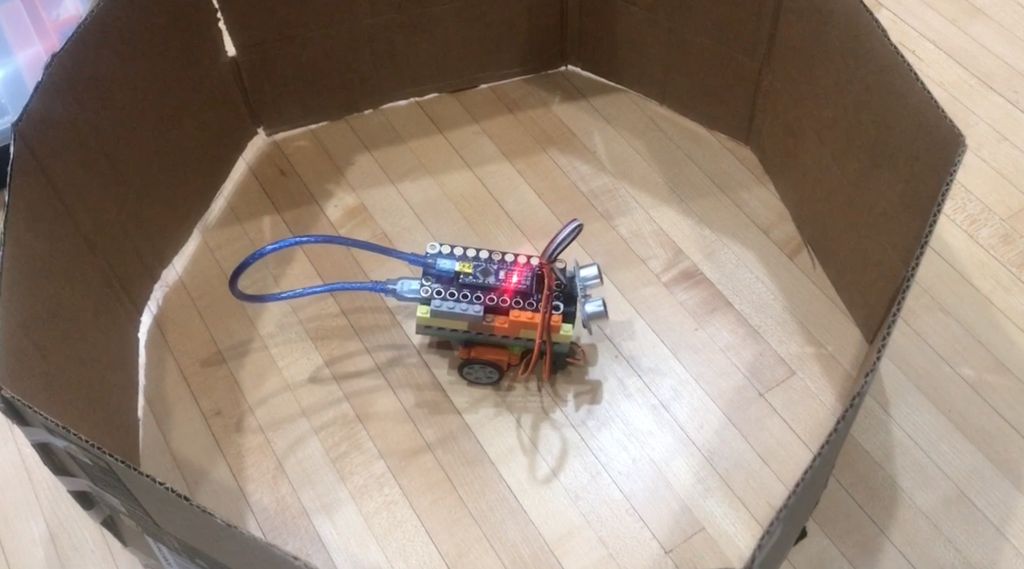
Nachdem Sie einen Roboter gebaut und den Code darin geladen haben, können Sie mit den Tests fortfahren!
Am einfachsten ist es, eine externe Stromquelle anzuschließen und den Roboter vorwärts fahren zu lassen. Wenn Sie Ihre Hand vor ihn legen, muss er sich zurückbewegen, sich umdrehen und wieder vorwärts gehen (stellen Sie sicher, dass er sich nicht vom Tisch bewegt!).
Wir haben eine einfache sechseckige "Arena" aus Pappe gebaut, damit der Roboter einen Platz zum Fahren hatte. Haben Sie keine Angst, mit dem zu experimentieren, was Sie haben.
Schritt 8: Weiterentwicklung
Wenn Sie an der Entwicklung dieses Projekts interessiert sind, stellen Sie Ihnen folgende Fragen:
- Was haben Sie beim Zusammenbau des Roboters gelernt?
- Was hat Ihre Teileauswahl beeinflusst?
- Wird der Roboter schneller fahren, wenn seine Räder erhöht werden?
Der Code enthält zwei Variablen, mit denen Sie die Zeit ändern, zu der der Roboter zurückrollt, wenn er ein Hindernis erkennt, und die Zeit, zu der er sich dreht. Tauschen Sie goBackwardTime und turnRightTime aus und sehen Sie, wie sich dies auf das Verhalten des Roboters auswirkt.
//
int goBackwardTime = 1000;
//
int turnRightTime = 1000;Siehe auch: