Fortsetzung einer Artikelserie zum modellorientierten Design. In der vorherigen Serie:
- Modellbasiertes Design - Wie man Tschernobyl nicht wiederholt
- Modellbasiertes Design. Bürstenloser Gleichstrommotor
- Modellorientiertes Design. Erstellung eines zuverlässigen Modells am Beispiel eines Flugzeugwärmetauschers
- Der Glanz und die Armut des modellbasierten Designs für DO-331-Standards für die Luftfahrt
In dieser Reihe haben die Autoren Yu. N. Kalachev und A.G. Aleksandrov präsentiert ein mathematisches Modell eines aktiven Gleichrichters in einer Strukturmodellierungsumgebung.
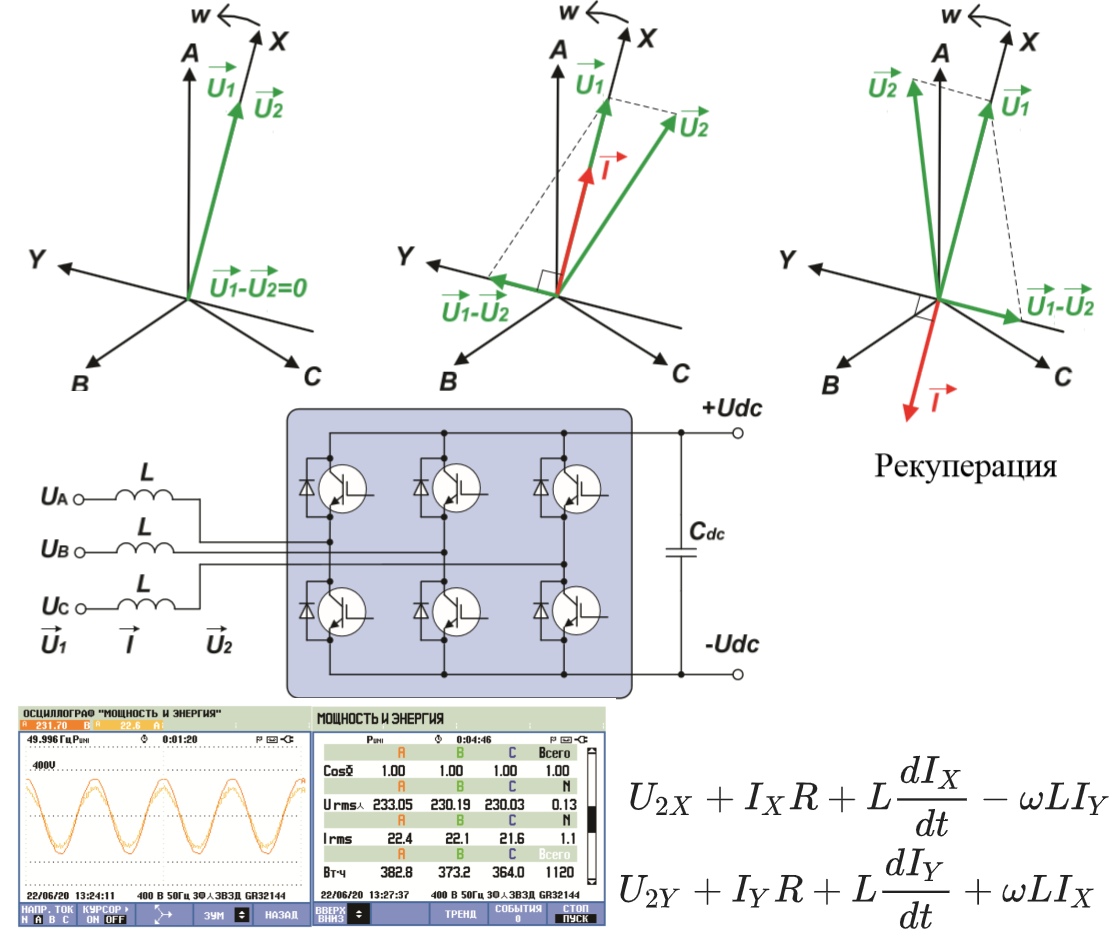
Aktive Gleichrichter werden häufig in der Konvertierungstechnologie eingesetzt, um den aktiven Charakter des Energieaustauschs mit dem Netzwerk sicherzustellen. Sie sind ein bidirektionaler AC / DC- Wandler mit einem Leistungsfaktor und einer geringen nicht harmonischen Verzerrung. Die Basis des Geräts ist ein dreiphasiger Brückenwechselrichter, der über einen dreiphasigen Reaktor mit dem Netzwerk verbunden ist (siehe Abb. 1).
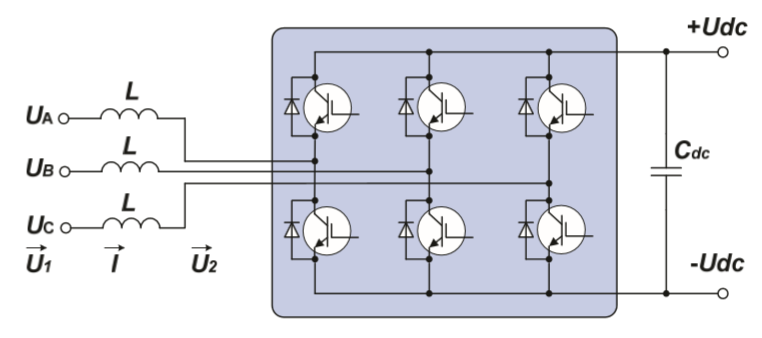
Feige. 1 - Schematische Darstellung eines aktiven Gleichrichters
1. Wie funktioniert es?
, (Udc) .
Cdc</sub> , (, ). , .
( ) , . , , .
, π/2. , π/2, . , , .
( ) , π/2, . .
.2 , .
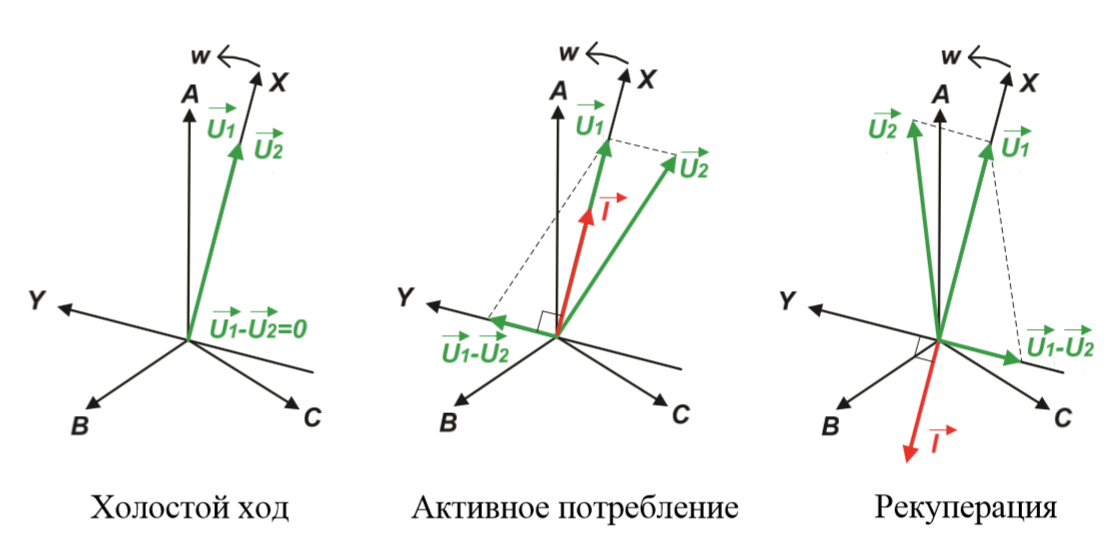
. 2 –
:
—
— ,
—
—
ABC – ,
XY – , X .
.2 : ±90º, , .
, , , (Udc). . - IGBT- .
2. Die mathematische Beschreibung des Betriebs des aktiven Gleichrichters
Für die Schaltung in Fig. 1 können wir den folgenden Ausdruck schreiben:
R der aktive Widerstand der Drossel ist;
L ist die Induktivität der Drossel.
Für ein rotierendes XY-Koordinatensystem, das dem Spannungsvektor des Eingangsnetzwerks zugeordnet ist, können Sie schreiben:
Wo:
für 50 Hz
- aktive Komponente des Eingangsstroms (fällt mit der Phase des Netzwerks zusammen);
- Blindkomponente des Eingangsstroms (um 90 ° nach oder vor der Netzphase).
Damit die Art des Verbrauchs des Korrektors aktiv ist, muss beibehalten werden .
Zusätzlich muss der Korrektor die Funktionen des Gleichrichters bereitstellen, dh den eingestellten Wert beibehalten , unabhängig vom Laststrom.
3. Der Aufbau der aktiven Gleichrichtersteuerung
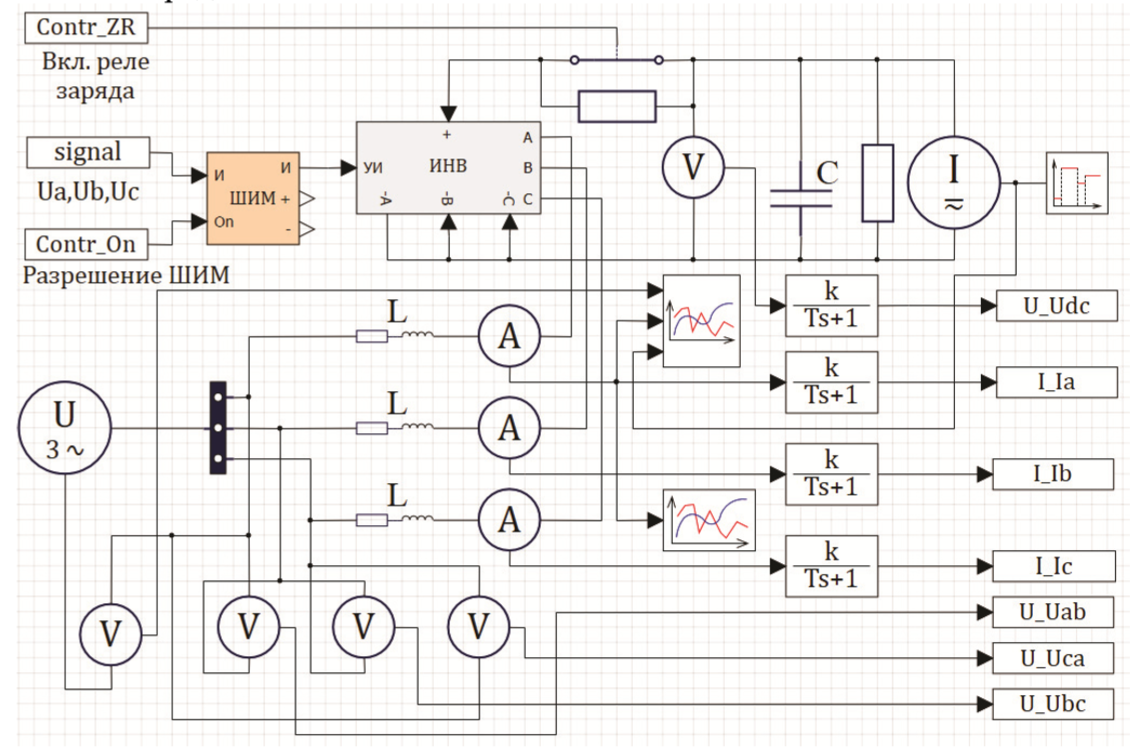
Betrachten wir die Struktur des Systems anhand seines Modells in SimInTech (Abb. 3).
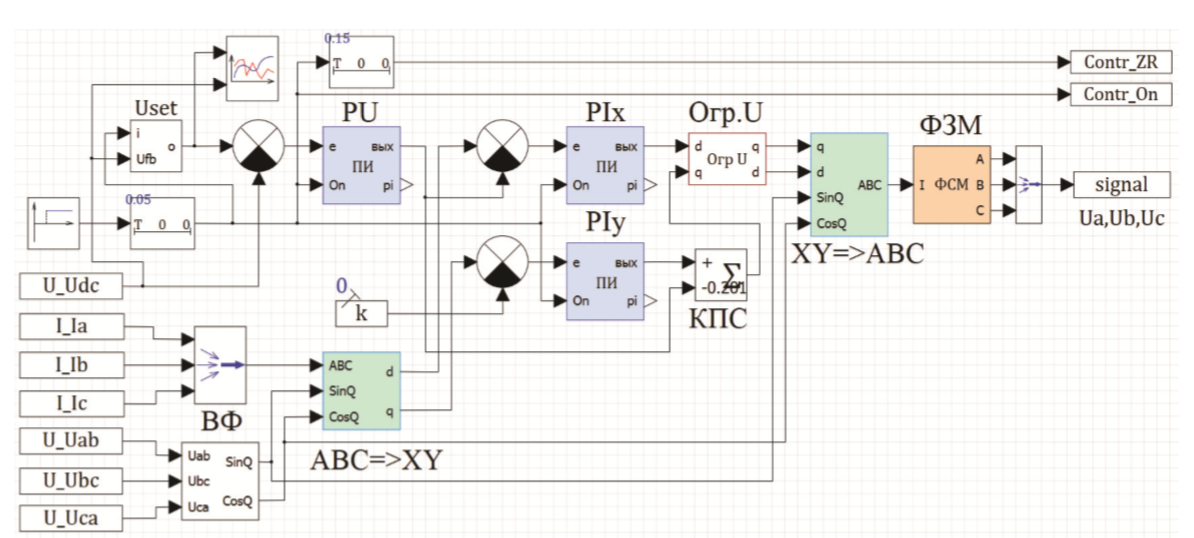
Feige. 3 - Strukturdiagramm des Modells
XY . (), .
() ().
:
Uset – Udc,.
– , .
ABC=>XY – , Y, .
XY=>ABC – Y .
PU – (), .
Ix – , .
Iy – , Y .
.U – Y — .
— (. 1.1). X, Y.
– — .
:
- – . , , . , , . =>XY , , XY => , . , , .
- , , SimInTech ( , help ).
4.
.4.
. 4 –
:
L = 0.0015
= 10 000
– 8.33
5.
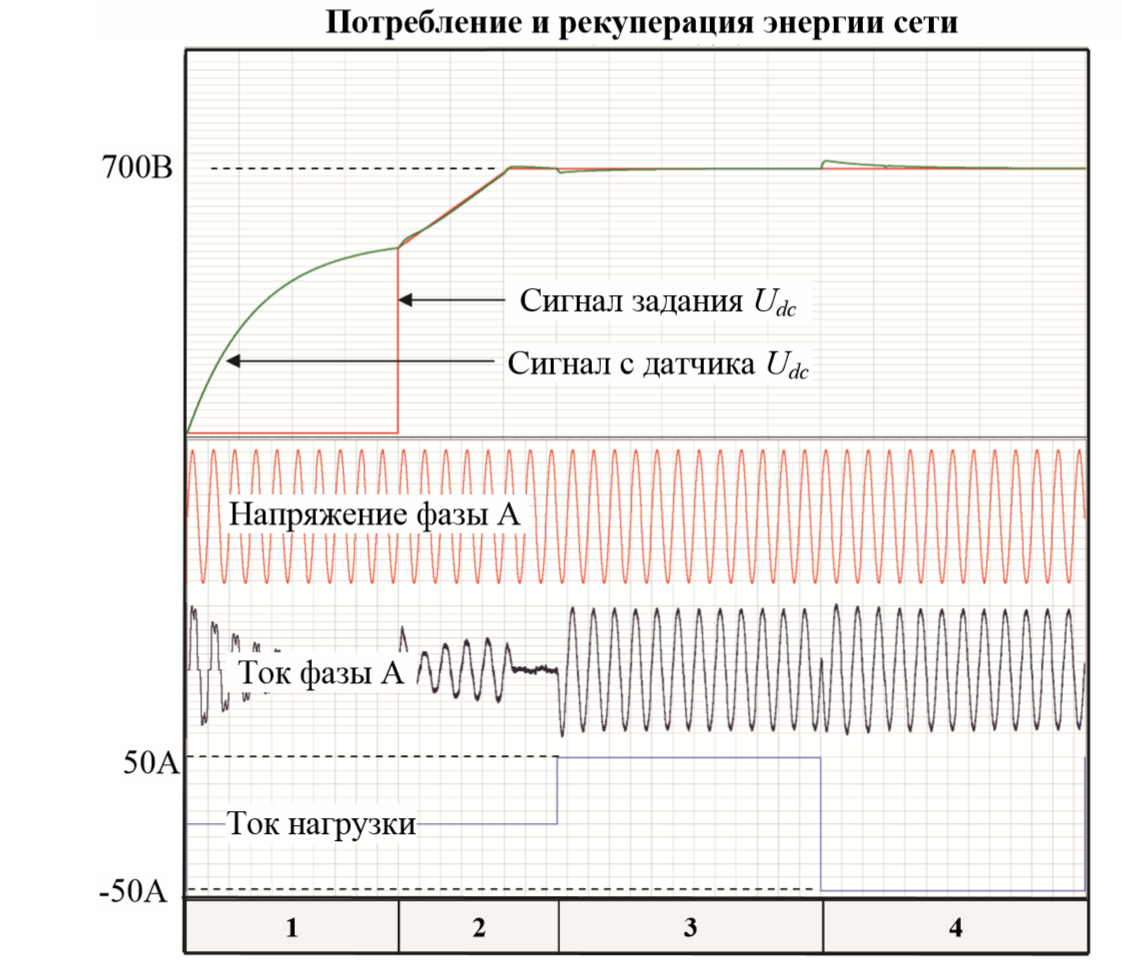
, . – 160 — 1 () .
(.5, 6 7).
1 – , .
2 – (700).
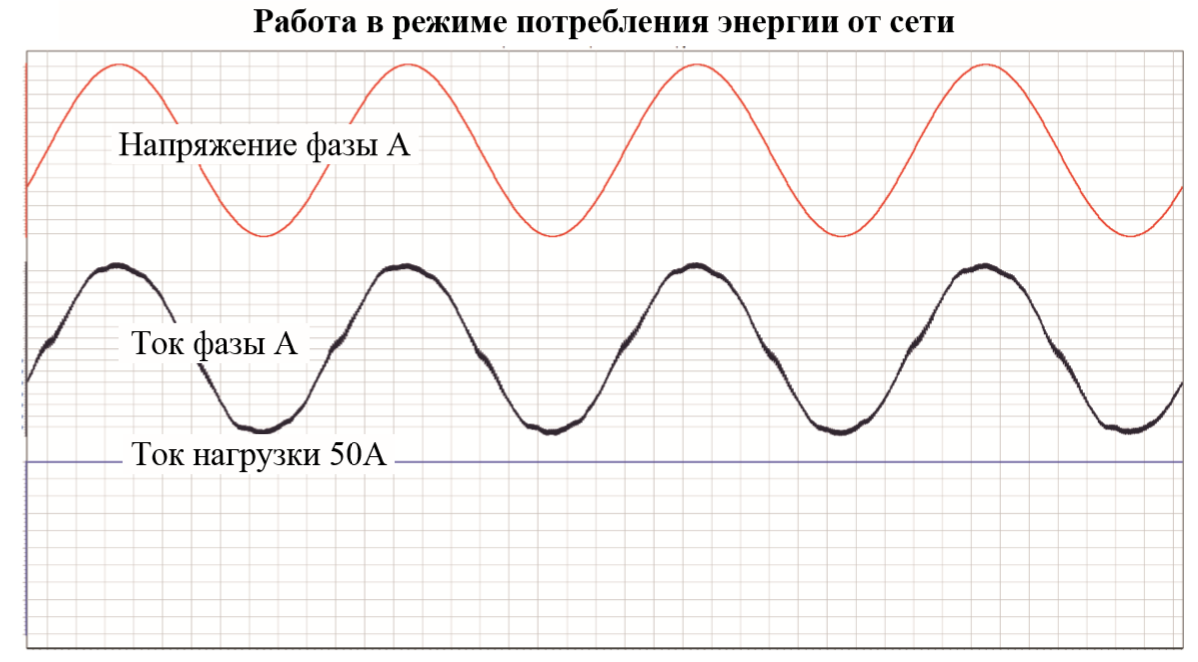
3 – (50) .
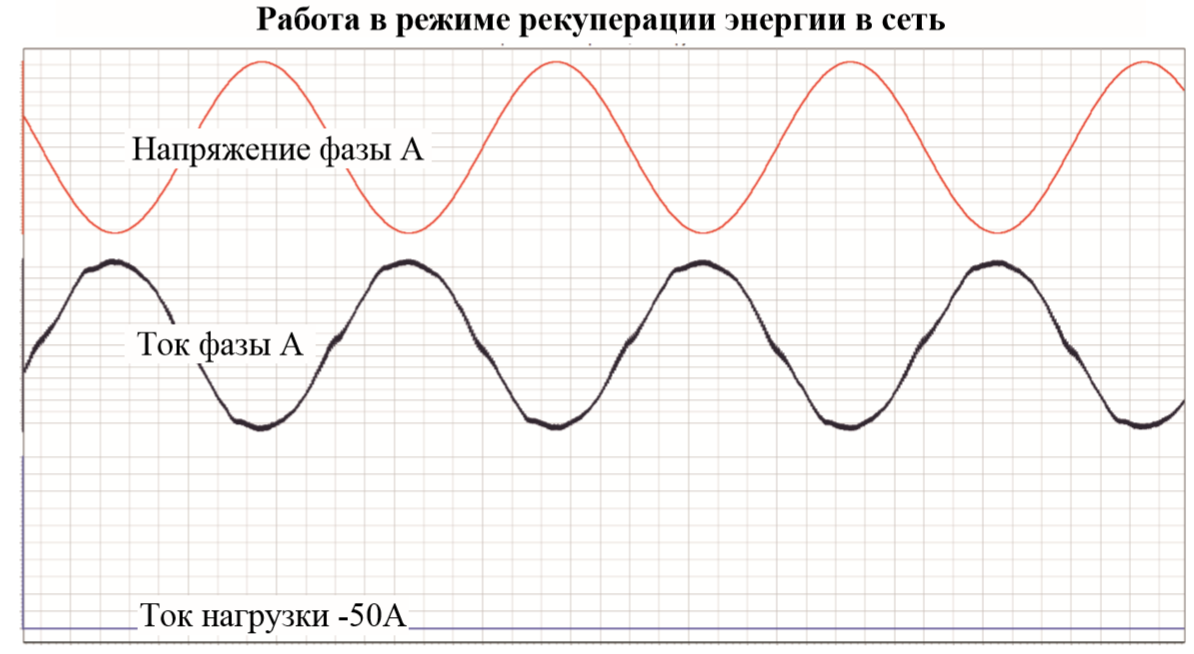
4 – (-50) .
. 5
. 6
. 7
. SimInTech 4.4% .
.8 .
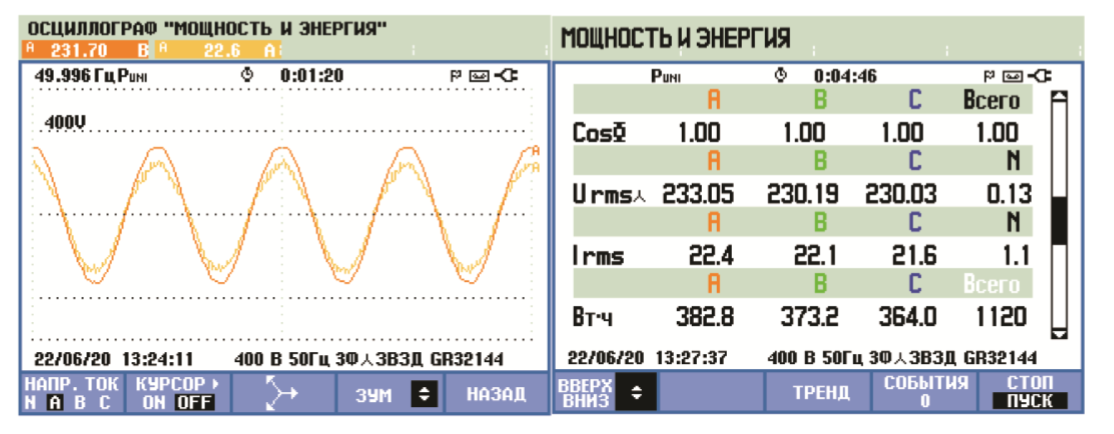
Feige. 8
Es kann festgestellt werden, dass Strom und Spannung in Phase sind und Cosφ = 1
Kontaktaufnahme mit dem Autor Yuri Nikolaevich Kalachev (Kalachev_i@mail.ru)
Weitere Informationen zur Electric Drive-Toolbox finden Sie unter:
http://3v-services.com/books/978-5-97060-766-4/?yclid=3971894245794548684